 |
<Xy>
an automated quartertone xylophone
Godfried-Willem RAES
2006-2007
|
<Xy>
After extending the orchestration of our robot orchestra in
the bass with robots such as <Qt>, <Bako>
and <So> we were in need of another instrument in
the high pitch range and with short and penetrating percussive pitches. Long
sounding percussive instruments such as <Vibi>
and the quartertone <Tubi> were since long available.
So our choice for a xylophone seems evident. But, since we are working on extensions
of what is normally possible with instruments, we decided to design <Xy>
as a quartertone instrument with a range of 3 1/2 octaves, 88 notes in total.
The range is:
Two different midi channels are used. The basic channel (2)
is for the 'normal' notes, the channel above it (3) for the quartertones.
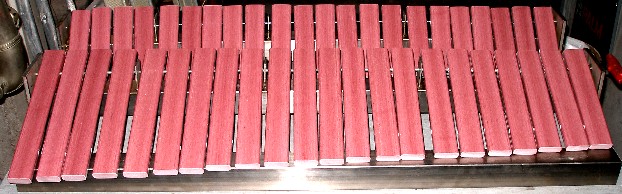
For the staves themselves we selected a synthetic resin reinforced with glass
fiber (brand named 'Vibercore') rather than the usual tropical wood. Synthetic
material sounds more penetrating and is a lot more durable as well as pitch-stable
over time. Very much by design we did not fit resonators under the lowest staves.
By omitting these, we come closer to the historical sound of the original xylophone:
the Hultze Glechter as described by Arnold Schlick (1511) to give the sound
of a skeleton and hence all associations with the death.
The solenoid beaters, 88 in total, are controlled by four PIC
microcontrollers mounted on four PC boards. A complete schematic drawing is
shown under tech-specs at the bottom of this page. We selected the 18F4620 microcontroller
for this robot. With the firmware developed for this processor we can obtain
a pulse time resolution of 27.2µs. All mosfets used are IRL640 types.
This type of board was also used for the robots <Klung>
and <Belly>. The power supply designed is not
stabilised, since the current drawn from it only flows in very short pulses.
The voltage is about a factor five higher than the nominal operational voltage
for the solenoids, thus allowing for a very fast response. Obviously, sticky
notes will burn the solenoids!
The constructional parts for this robot are all made from stainless steel. The
robot was designed to be either suspended with strong chains or mounted on its
wheelbase, on ground level. For ground transportation and easy manipulation
on stages, xy was designed with six heavy duty wheels with red colored polyurethane
tires. De center wheel being mounted a few millimeters lower then the right
and left wheel couples. Thus turning became really easy. <Xy> was fully
finished and functional on april 19th of 2007. It took us six months, pretty
fast for a robot of this complexity.
Midi Mapping:
| |
|
- Midi note range: 65- 108. Velocity implemented.
- Note Off commands are not required.
- Controller 66: power on/off switch (must be sent on channel 3)
- Controller 123: all notes off
- Midi notes: 120-127 : lights (ON/OFF)
- Midi Channels: 2 and 3 (counting 0-15)
- Lights:
- channel 2: notes 123,124,125,126: side lights on swanns necks.
[127 reserved]
- channel 3: notes 123, 124: bright white side panels, 125: red
LED spotlite lower staves, internal. 126, 127 red LED spotlites
upper staves interal.
- Program change 0, 122-127 select different velocity lookup tables.
The velocity scaling lookup tables can be programmed using sysex commands.
0 is the original, non-reprogrammable mapping. It is recommended to
allways use 122, which contains an optimised mapping. Program change
123 contains a better scaling for pp playing.
|
Technical specifications:
- sizes: width:1070mm, height 650mm, depth: 300mm (case: width 1130 mm x 670
mm x 320 mm)
- weight: estimated ca. 65 kg. (without case)
- power: 230 V / 330 W (peak)
- tuning: based on A=442 Hz for the normal notes and A=455 Hz for the quarter
tones.
- Ambitus: midi notes 65-108 (88 notes in total)
- Insurance value: 13.000 Euro
Design and construction: dr.Godfried-Willem
Raes (2006-2007)
Collaborators on the construction of this robot:
- Xavier Verhelst (materials research)
- Kris De Baerdemacker (research & logistics)
- Johannes Taelman (firmware PIC controllers)
- Kristof Lauwers (application code)
Music composed for <Xy>:
- Godfried-Willem Raes "Geroxy"
- Godfried-Willem Raes "Picrada Study: Xy"
- Godfried-Willem Raes "Quadrada Study #11: Qua Xy"
- Xavier Verhelst "Ting Ting Yahe"
[MP3 download]
- Hans Roels "Voor Xy en Qt"
- Sebastian Bradt "Barbiefication" , voor Korn en Xy
[MP3 download]
- Mirek Coutigny "in the making"
Nederlands:
<Xy>
In het M&M robotorkest hadden we meer en meer behoefte
aan een juistgestemd instrument in hoge ligging dat korte tonen kon voortbrengen.
Lang klinkend slagwerk hadden al ruim vertegenwoordigd met automaten zoals <Vibi>
en <Tubi>. De keuze voor een xylofoon lag dan ook voor de hand. Aansluitend
bij onze onderzoeksprojekten naar verruiming van expressiemiddelen in mikrotonale
zin in samenwerking met Hogeschool Gent (School of Arts), lag het voor de hand
deze automatische xylofoon meteen als kwarttoonsinstrument te bouwen. Daarmee
kunnen we nu beschikken over volgende kwarttoonsinstrumenten: <Tubi>,
<Puff>, <Qt> en nu
dus ook <Xy>. De tessituur voor <Xy> is:
Voor de klankstaven gebruikten we sintetisch glasvezelversterkt
materiaal, geleverd onder de merknaam 'Vibercore' door Vancore in Nederland.
Dit materiaal geeft een wat harder maar ook naar toonhoogte stabieler resultaat
dan de gebruikelijke tropische houtsoorten. Anders dan bij de tegenwoordig gebruikelijke
orkest xylofoons verzaakten we heel bewust aan het monteren van buisrezonatoren
onder de laagste klankstaven. Op die wijze blijven we dichter bij het historisch
klankbeeld, waarin uitgerekend het non-harmonische van de klank voorop staat.
Vergeten we niet dat de xylofoon in de muziek simbool stond voor de dood (gerammel
van skeletten, zoals beschreven door Sebastian Virdung en Arnold Schlick in
1511 waar die het heeft over de Hultze Glechter, en mid 17e eeuw door Marin
Mersenne) en dat die voor de tweede helft van de 20e eeuw nooit met resonatoren
werd gebouwd. Voor de schikking van de latten verzaakten we ook aan de traditionele
(en eigenlijk uit ergonomisch en speeltechnisch opzicht volslagen idiote) rangschikking
van de staven volgens het pianoklavier. We schikten de staven zo dat de ene
kant van het instrument de 'gewone' tonen speelt en de andere de kwarttonen.
Aangezien de latten het geluid langs beide zijden projekteren, levert dit -anders
dan bij ons kwarttoonsorgel <Qt>- geen noemenswaardige
balansproblemen op. Elke kant is opgebouwd uit twee bovenelkaar opgestelde vertikale
rijen van 22 klankstaven. De klankstaven werden opgehangen op hun nodale punten.
Op deze wijze kon het instrument bijzonder kompakt worden gebouwd. De robot
kan zowel op het voorziene wielstel op de grond worden geplaatst als opgehangen
aan de daarvoor voorziene haken. In dit laatste geval moet de konstruktie van
de zoldering natuurlijk wel voorzien zijn van een takel en uiteraard voldoende
draagkrachtig. In gebruikelijke teaterzalen stelt dit zelden problemen. Het
wielstel bestaat uit zes wielen van 160 mm doorsnede, waarbij het middelste
wielkoppel 5 mm lager is gemonteerd dan de andere wielassen. Hierdoor is zonder
gebruikmaking van een kruisdissel, toch een goede wend- en verplaatsbaarheid
gegarandeerd. De knalrode banden zijn vervaardigd uit massief polyurethaan met
een hoge densiteit en een uitstekende veerkracht. De wielen zelf zijn voorzien
van degelijke kogellagers.
De gehele konstruktie werd uitgevoerd in manueel TIG gelast
inox AISI 304L. Alle boringen uitgevoerd met kobaltboren, evenals de verspanende
bewerkingen. Voor sommige uitsnijdingen werd een plasmasnijder gebruikt.
De besturing maakt gebruik van vier afzonderlijke PIC mikrokontrollers
van het type 18F4620. Elke processor staat in voor de besturing van 22 klankstaven.
De aanslagsterkte van elke staaf kan afzonderlijk binnen ruime grenzen geregeld
worden. De polyfonie van het instrument is onbeperkt. De gebruikte elektromagneten
zijn van hetzelfde type dat we ook gebruikten voor <Tubi> en <Troms>.
De werkingsspanning beloopt zowat het vijfvoudige van wat de spoelen normaal
kunnen verwerken. De duty cycle is evenwel beperkt tot minder dan 10%.
Als extra features werd <Xy> ook nog voorzien van lampjes:
vier op zwanenhalzen gemonteerde lampjes, vier fel witte LED's op de zijpanelen,
drie rode LED spots op de binnenzijde van het instrument. Uiteraard allemaal
stuur- en programmeerbaar. De technische bijzonderheden zijn uitvoerig bekommentarieerd
en gedokumenteerd in enerzijds het bouwdagboek en anderzijds de technische en
onderhoudsinstrukties voor deze robot.
Geillustreerd bouwdagboek:
Omdat ons vaak wordt gevraagd hoeveel werk en tijd kruipt in,
en nodig is voor, het bouwen en ontwikkelen van een muzikale robot, hebben we
ook voor <Xy> een beknopt bouwdagboek bijgehouden. Omdat we de bouw tot
in de laatste details graag illustreren, kan het ook voor anderen die ons op
dit pad willen volgen en/of verbeteren, van praktisch nut zijn.
- 15.11.2006: research naar klankstaven en materialen.
- 06.12.2006: eerste ideen en konkrete tekeningen.
- 08.12.2006: Offerte gevraagd voor klankstaven in sintetisch materiaal.
- 18.12.2006: Studie van de mogelijke ophangingen van de staven.
- 02.01.2007: Klankstaven besteld bij Vancore.
- 08.02.2007: Offerte binnen en ondertekend. Kost ca.1500 Euro.
- 15.02.2007: faktuur klankstaven betaald.
- 22.02.2007: Ontwerpen en schetsen voor mogelijke vormgeving.
- 25.02.2007: materiaal research kloppertjes: polyamide, nylon, hout, bakeliet,
steen, messing
- 05.03.2007: Wachten is nog steeds op de levering van de klankstaven.
- 06.03.2007: De klankstaven zijn vanuit nederland verzonden...
- 09.03.2007: De klankstaven zijn in Gent aangekomen. Eerste layout pogingen.

- 10.03.2007: Opmetingen voor ophangmogelijkheden. Berekeningen chassis konstruktie
in inox. Beslissing om hetzelfde type elektromagneten te gebruiken als toegepast
in Tubi. Werkspanning bepaald op 48V. De magneten hebben een rating voor 12V
bij 100% duty cycle.
- 11.03.2007: Laswerk twee dragers voor de klankstaven in 4 rijen van 22 stuks:
 De drager is gemaakt uit inox vierkante buis 50x50x2, de plaatjes uit plat
30x3x50 ,met een gat op 20mm van de rand. De zijstukken zijn 150 x 8 x 100,
eveneens met een 5mm gat op 20 mm van de rand.
De drager is gemaakt uit inox vierkante buis 50x50x2, de plaatjes uit plat
30x3x50 ,met een gat op 20mm van de rand. De zijstukken zijn 150 x 8 x 100,
eveneens met een 5mm gat op 20 mm van de rand.
- 12.03.2007: Bestelling inox staaf van 5mm diameter, op lengtes van minstens
1200mm. Demar-Lux. Bestelling elektromagneten bij August Laukhuff. Kost elektromagneten
(88 stuks), ca.3500 Euro. Inventarisatie van de beschikbare pulse boards en
de nodige elektronische komponenten. Bestelling 100 M5 kogelkoppen voor de
kloppers, bij Overtoom.
- 13.03.2007: Bestelling van de inox M5 bouten met platte kop en tot tegen
de kop doorlopende schroefdraad bij MEA.
- 14.03.2007: Bepaling van de gewenste hardheid van de kloppertjes.
 Hard bakeliet is zeker voor de hoogste noten vereist.
Hard bakeliet is zeker voor de hoogste noten vereist.
- 16.03.2007: Zaagwerk in 10mm dikke inox plaat van de zijkanten voor de dragers
van de elektromagneten. Zaagwerk dragers voor de elektromagneten zelf (inox
304, plat 60 x 4 x 1060). Beloofde levering Demar-Lux inox kwam er niet door
vandaag...
- 17.03.2007: Hele werkdag las en boorwerk aan het inox chassis. Dragers elektromagneten
bovenste 44 klankstaven. Bovendeel vastgelast aan staafdrager onderdeel. Afmeten
en boren gaten voor de elektromagneten, kwarttoonsrij.


- 18.03.2007: Boorwerk en montage elektromagneethouders bovenste rijen latten.
Proefmontage van de 24 elektromagneten die we nog in voorraad hadden.


- 19.03.2007: Wachten op bevoorrading: Leveringen Demar Lux, MEA, Overtoom
en Laukhuff... Soldeerwerk van de printplaten voor de vier PIC mikrokontrollers.
- 20.03.2007: Verder soldeerwerk aan de vier mikrokontroller boards. Hardware
bugs rond gnd en Vcc verholpen met een chirurgische ingreep op de printsporen.
SMD 100nF caps opgesoldeerd. Elk board voorzien van een eigen 5V voeding.
We vallen zonder IRL640 mosfets...
 De reeds gesoldeerde boards zijn te zien op de foto. Alleen het linkerboard
is voorzien van de obligate 6N137 optocoupler voor het midi-in signaal. Op
het tweede board van links ontbreken nog de IRL640 mosfets. Levering honderd
bakelieten kogelknoppen met M5 schroefdraad van Overtoom.
De reeds gesoldeerde boards zijn te zien op de foto. Alleen het linkerboard
is voorzien van de obligate 6N137 optocoupler voor het midi-in signaal. Op
het tweede board van links ontbreken nog de IRL640 mosfets. Levering honderd
bakelieten kogelknoppen met M5 schroefdraad van Overtoom.
- 21.03.2007: Konstruktie nokkenschakelaar met 3-prong netingang voor de stroomaansluiting.
Bestelling Farnell IRL640 mosfets en Weidmueller konnektors. Berekening van
de voedingsvereisten (zie technical data onderaan deze webpagina).
- 22.03.2007: Mosfets geleverd en meteen ingesoldeerd op de boards. Helaas
zijn de niet RoHS compliant exemplaren uitverkocht en de veel duurdere en
veel slechter op korrosie presterende RoHS exemplaren de enige die nog te
krijgen zijn... Tegen de beloftes in, is het nodige Inox door Demar-Lux nog
steeds niet geleverd. Dit betekent een week vertraging met de laskonstruktie.
- 23.03.2007: Platkop M5 inox boutjes geleverd door MEA. Die zijn nodig voor
de konstruktie van de 88 kloppertjes.
- 24.03.2007: Proefmontage van 1 rij kloppertjes.
- 26.03.2007: Levering inox door Demar Lux, we kunnen verder met de laskonstruktie.
- 28.03.2007: Verder uittekenen van het lasplan voor de struktuur van <Xy>.
De elektromagneten van Laukhuff zijn echter nog steeds niet geleverd.
- 30.10.2007: Zijkanten uit elk 5 10mm inox delen onder verstek uitgezaagd
en gelast. Elektromagneten van Laukhuff geleverd.
- 31.10.2007: Hoofdstruktuur draagchassis helemaal afgelast. Boren drager
onderste rij elektromagneten, kwarttoonskant.
- 01.04.2007: Boren drager onderste rij elektromagneten, normale kant. Inlassen
van de elektromagneetdragers. Studie van het slingerprobleem van de latten.
Proefmontage elektromagneten op de onderste rijen. Zagen en lassen bevestigingssteunen
voor de hoofdschakelaar en voor de vier PC boards.
- 02.04.2007: Proefmontage van alle elektromagneten. Assemblage van alle kloppertjes.
Selektie voedingstransformatoren. 2x18V / 300VA toroidal lijkt geschikt. Dit
geeft 51V na gelijkrichting en afvlakking. (Op Tubi hadden we 48V geimplementeerd,
daar weliswaar met stabilisatie). Laswerk draagstruktuur voeding.
- 03.04.2007: Laswerk PIC board houders. Montage solid state relais. Bedrading
51V voeding. Montage 12V omron voeding voor licht en solid state relais.
- 04.04.2007: Konstruktie vier XLR lamphouders met zwanenhals, geisoleerd
van chassis: draaistukken in polyamide en PTFE (Teflon). Montage PC-boards.
Bestelling zes rode polyurethaan wielen 160mm doorsnede.
- 05.04.2007: uitsnijden, boren en inlassen van de horizontale latjes nodig
om het slingeren van de latten te verhinderen. Inkoop fel witte LED's. Afdraaien
3 assen, 300mm x 20mm met sleuven voor omegaringen.
- 06.04.2007: Opzet vleugeltjes gesneden en ingelast voor de drager van de
bovenrij spoelen. Beide bovenste rijen spoelen definitief gemonteerd op een
kussentje van silikonenrubber en met twee inbus hex M4x16 inox boutjes met
tussenring. Op deze wijze lijkt het ondenkbaar dat een en ander in gebruik
of transport nog los zou komen te rammelen. Kabelgeleidingen en trajekt bestudeerd
en uitgetekend. Eerste 28 spoelen volledig bedraad.
- 07.04.2007: Alle elektromagneten van de beide bovenste rijen bedraad: 44
spoelen. Drie assen vastgelast in onderste profiel. Bedrading netspanningsgedeeltes.
Montage 9V transfo en LED lampjes kant schakelaar. Hoofdschakelaar definitief
bedraad en vastgezet. Opgelet: de 'massa' aansluiting op de schakelaar gebruikten
we als gemeenschappelijke +12V aansluiting voor de LED's en het Kodak solid
state relais.
- 08.04.2007: Bedrading voedingsspanningen naar Weidmueller konnektoren. Aansluiting
witte en rode led's. De eerste 44 kloppertjes zijn reeds funktioneel.
- 09.04.2007: Montage magneten op de onderste rijen. Bedrading van alle elektromagneten
afgewerkt. Midi- bedrading uitgevoerd evenals de bedrading van de lampjes.
Begin montage viltjes op de ophanging van de staven zelf. <Xy> kan in
principe al spelen, alleen de PIC firmware ontbreekt nog.
- 10.04.2007: Montage van alle klanklatten, aanmaak en afregeling van de tussenviltjes.
Firmware voor Xy door Johannes Taelman geprogrammeerd. Xy speelt zijn eerste
stukjes! Eerste interaktieve stukjes geprogrammeerd: Geroxy en Picra_Xy.
- 11.04.2007: Avant-premiere / try out voor <Xy>: M&M koncert bij
Stichting Logos. Picrada studie voor Xy en Gestrobo studie.
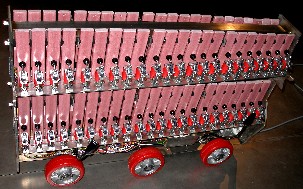
 Op de foto, Xy met de voorlopige vier wielen in polyamide.
Op de foto, Xy met de voorlopige vier wielen in polyamide.
- 12.04.2007: Alle bakeliet kloppertjes vastgezet met Loctite 638 en individueel
afgeregeld op regelmatigheid van aanslag. Onderste bindsnoeren door de latten
geweven. De wielen op de foto zijn slechts voorlopig!
- 13.04.2007: Veren aan de doorlopende ophangdraden van de onderkant van de
klankstaven bevestigd en aan het chassis gespannen. Uiteinden van de bovenste
4mm inox as op maat gebracht en voorzien van aluminium borgingen, eigenlijk
gerecycleerde 4mm potentiometer knoppen uit de voorraad in ons elektronisch
labo... File player in GMT aangepast aan Xy door Kristof Lauwers.
- 14.04.2007: Twee extra rode LED spotlites toegevoegd in bovengedeelte. Note
mapping 126 en 127.
- 16.04.2007: Tests voorzieningen voor Xy in de GMT software.
- 17.04.2007: Vier solid state Crydom DC relais besteld om het probleem met
de XLR lampjes te vermijden.
- 19.04.2007: De zes wielen voor Xy zijn geleverd en werden meteen gemonteerd
en vastgezet met omega ringen. Afstandsbusjes: inox naadloze buis 25mmm, binnenmaat
past voor 20mm assen. Lengte: 54mm.
 De wendbaarheid
van de robot met zes wielen blijkt voortreffelijk te zijn. Hoge
resolutie fotos op de site beschikbaar gesteld.
De wendbaarheid
van de robot met zes wielen blijkt voortreffelijk te zijn. Hoge
resolutie fotos op de site beschikbaar gesteld.
- 04.05.2007: de eerste stukken voor het M&M orkest waarin Xy is opgenomen
worden getest...
- 18.05.2007: Xy tests door Hans Roels.
- 23.05.2007: Velocity lookup table research door Kristof Lauwers.
- 24.05.2007: Lookup tables in flash memory gezet. Bereikbaar via program
change 122 op beide kanalen qt en qtq.
- 25.05.2007: Verdere research en evaluatie door Kristof Lauwers.
- 26-28.05.2007: Presentatie van <Xy> op Klara in Dendermonde.
- 01-13.06.2007: aanmaak Xy partijen in de tango files voor het tango koncert
van 14.06.
- 11.07.2007: Xy transportklaar gemaakt voor het optreden op de Gentse Feesten
in de Spiegeltent.
- 25.09.2007: Ontwerp transport- en besturingshandvat.
- 25.12.2007: Ontwerp demonstratiestuk voor Xy, voor de 'Lonely Robots' CD.
- 05.02.2008: Lookup voor prog.change 123 geprogrammeerd door Kristof Lauwers.
Dit om een betere scaling te bereiken in de pp bespeling.
- 08.02.2008: Premiere van 'Ting Ting Yahe' van Xavier Verhelst voor <Xy>.
- 26.02.2008: Start konstruktie transportkist voor Xy.
- 27.06.2010: Xy joined the party at Alden Biesen.
- 22.11.2011: Shaky connectors discovered on the high normal note board. These
are a french brand... we will have to replace them with the real Weidmueller
ones...
- 14.06.2012: Persistent problem with power on command. Apparently CC66 gets
reset to 0 without receiving such a command.
- 20.04.2013: <Xy> survived the trip to Glasgow very well! We expect
him back in Ghent on monday 22nd of april.
- 23.04.2013: No damage to Xy on return from Glasgow.
- 11.05.2015: <Xy> and <Hybr> up to De Centrale. Recurring CC66
problem.
- 10.09.2015: We have to carefully check the connectors on Xy, as intermittent
problems are reported by Kristof Lauwers.
- 18.10.2015: <Xy> off to Dok19 for Kristof's robot concert.
- 19.10.2015: All four plug connectors on the power lines of the pulse board
replaced with original Weidmueller parts.
- 28.10.2016: <Xy> taken on the road to Brugge for Iedereen Klassiek.
- 30.10.2016: Returned safely from Bruges.
- 29.07.2017: Intermittent problems with power loss. Seems an already reported
CC66 problem is reappearing. (cfr. 10.09.2015) Glitches on the Kodak optical
relay?
- 30.07.2017: Hardware checked and found to be o.k. Voltage on the solenoids
is 51 V. Controller #66 must be sent on channel 3 (the quartertone series!)
in order to work. This explains the problems encountered in Sonar and sequences,
in cases were there is only a single track for Xy, ommitting the quartertone
channel.
- 01.08.2017: <Xy> on the road to Liepaja (Letland).
- 09.08.2017: <Xy> returned safely from its trip to Liepaja.
- 02.09.2021 - 30.09.2021: <Xy> exhibited at the SMAK museum in Ghent.
- 22.07.2023: Bij nazicht ontdekken we dat de beide middelste wielen volkomen
stuk zijn geraakt. Ze werden nochtans niet overbelast maar blijken niet bestand
tegen langdurige blootstelling aan een konstante belasting. Ze zijn nochtans
nog maar 16 jaar oud. Zo zien ze er uit:

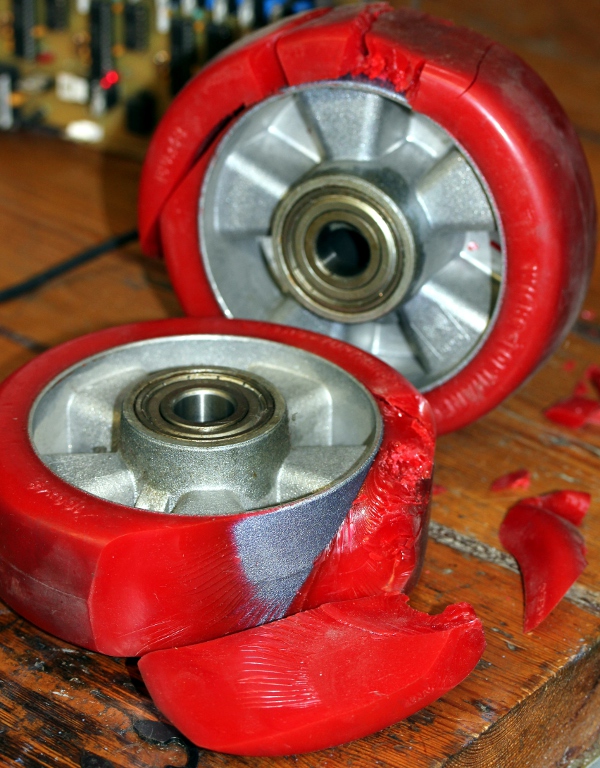 Voorlopig hersteld
met twee harde nylon wielen, maar mooi is dit zeker niet.
Voorlopig hersteld
met twee harde nylon wielen, maar mooi is dit zeker niet. 
- 14.09.2023: <Xy> mee op reis naar de Deutsche Oper Berlin voor de
Zeroth Law produktie van Gamut Inc.
- 02.10.2023: Bij aankomst van <Zy> terug in Gent, blijkt nog een Wicke
wiel van deze robot helemaal gedesintegreerd te zijn geraakt. Dat kunnen we
echter niet als transportschade beschouwen. Een degelijke oplossing voor deze
wielen dringt zich op.
- 06.11.2023: Als we de kapotte wielen willen vervangen -Kaiser en Kraft heeft
ze kennelijk op voorraad- komen we uit op een kost van meer dan 700 Euro...
Dat geld hebben we echter, met dank aan Francis Maes en Frederik Styns, niet
meer. Het wordt dus uitkijken naar een goedkopere oplossing ofwel de treurige
entropie haar gang laten gaan...
- 09.11.2023: Wielen vervangen door polyamide exemplaren met een looplaag
in polyurethaan. Die kosten 'slechts' 360 Euro. Aangekocht bij Kaiser en Kraft.
Bij de montage hadden we inox rondellen met een gat van 20 mm tekort. Die
moeten we later nog aanbrengen.
Last update: 2023-11-09
by Godfried-Willem Raes
Technical data sheet, design calculations and maintenance instructions:
Technische gegevens, ontwerpberekeningen en instrukties voor onderhoud en demontage:
- Schematic circuit drawing for the PIC microprocessor boards: (click on picture
to enlarge the drawing)
Power supply and circuit overview (only two boards shown):
Solenoid specification: August Laukhuff, 12/14 V nominal at 100% duty cycle.
Rdc = 30 Ohm, I=470 mA. Holding force 6 - 7.5 N. When used on 60 V, the current
drawn during the pulse is 2 A. Duty cycle should be limited to 10%.
White LED's: Uv=3.5 V, Imax 30 mA, 20 degrees, 850 mcd.
Power supply calculation:
The calculation for the requirements on the power supply are a little complicated.
A first limiting factor is due to the fact that data are transmitted to the
robot in a serial (midi) format. If the note-on messages flow in neck to neck
at the full midi baud-rate of 31250b/s, the minimum time between the starts
of any two note-on commands will be 952 microseconds. Thus a command to play
all 88 notes at once will take a minimum time of 83ms. We would hear this as
a fast arpeggio. This is unavoidable although the effect can be greatly masked
by sending all the notes in such clusters out of order.
If we scale the duration of the 1-127 velocity range from midi on pulse-times
in the range 156 microseconds to 20 ms, the consequence is that given the limitations
of midi, we can have a maximum of 20 ms / 952 µs = 21 overlapping velo-pulses.
If we use a 48 V power supply, the current required from it is thus reduced
to: 21 . (48 V / 30) = 33.6 A, or in peak power terms : 1613 Watt. So we should
dimension the buffer elco such as to be capable of coping with such situations.
A 15 mF elco would give us an RC time of 20 ms, so if we select a hefty 47 mF
cap we stay on the safe side. The transformer should be capable of delivering
8 A. The VA rating should be ca. 400 VA. In the final design we relaxed the
requirements a bit, and went for a 30 0VA toroidal transformer with two separate
18 V windings. The capacitor is rated 22 mF / 64 V.
Lites and auxiliary power supply: Omron, DIN rail mount type, S82K-2112. Input
voltage range: 200-240 Vac, Output 12 V / 1.2 A. Lot nr. 2863, made in Japan.
Detailed midi-lites mapping:
- channel 2, note 123 = 'normal' note side, low notes, XLR swanns neck mount
white tungsten bulb
- channel 2, note 124 = quartertone note side, low notes, XLR swanns neck
mount white tungsten bulb
- channel 2, note 125 = 'normal' note side, high notes, XLR swanns neck mount
white tungsten bulb
- channel 2, note 126 = quartertone note side, high notes, XLR swanns neck
mount white tungsten bulb
- channel 3, note 123 = brigth white LED's side panel high note side
- channel 3, note 124 = brigth white LED's side panel low note side
- channel 3, note 125 = RED led spotlite mounted inside the instrument, between
the lower staves.
- channel 3, note 126 = RED led spotlite mounted inside, higher Q side staes
- channel 3, note 127 = RED led spotlite mounted inside, higher K side staves
Note with regard to the lites:
- never replace the red LED-spotlites with halogen types! The power supply
is not designed to cope with the high currents involved with tungsten filament
bulbs. The LED spotlites are 12 V types.
- the bulbs in the swann-neck lites are 10 mm bajonet types, 12 V/400 mA as
used in audio mixing desks.
