|
<Belly>

Godfried-Willem
RAES
2002 /
2006
|
Robot: 'Belly'
This musical robot consists of a assembly of 34 (4 rows) brass bells. Although
arranged in order of pitch they are not a tuned carillon. The bells are signal
bells and not bronze carillon bells. The largest bell is about 30cm in diameter
and weights 17kg. Although determining fundamental pitch of this type of bells
is not a trivial undertaking, the auraly percepted pitch range of belly is between
455Hz for the lowest bell and 3200Hz for the highest. The complex spectrum is
very different for each individual bell.
The bells have individual beaters driven by heavy duty solenoids. Musical dynamics
are implemented by applying pulse width modulation techniques in the driver
circuits. Two PIC-type microprocessors are used to this end. However, the dynamic
range is different from bell to bell, being mainly dependent on the mass / pitch
proportion of the bell. (Heavier bells can be made to sound much louder than
light ones). Hence we designed the velocity scaling different for each individual
bell. The scaling tables have a resolution of 27.2µs and can be programmed
via sysex commands. The circuitry used is very similar to that developed for
our <Troms>. Only the power supply has a new design and now makes use
of a classical hefty analog power supply using a 300VA toroidal transformer..
Although <Belly> was build and finished in 2002, it has undergone a major
hardware revision in 2006 making the laptop computer required in the
first design obsolete. A small CCD video camera mounted inside the tetrahedral
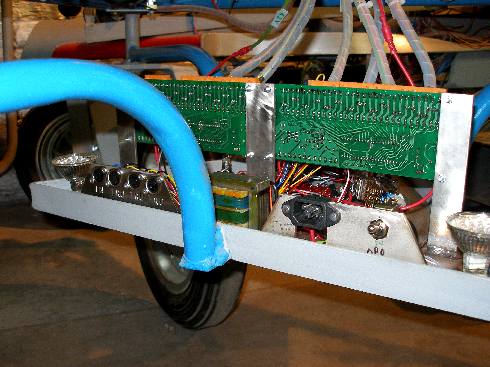
structure was added. The overview over the circuitry now looks like:
Detailed schematics for the PIC boards
can be seen by clicking this link. The instrument is mounted in a TIG-welded
tetrahedral structure with three large and sturdy wheels that can rotate a full
circle.
Mapping: midi notes 68- 102 corresponding to pitches as shown
below.

- Design & construction: Dr.Godfried-Willem Raes
- size: 1100 mm width, 1390 mm heigth
- weigth: ca. 150 kg
- control: Midi input.
Nederlands:
Robot: <Belly>


Belly is een automatische komputergestuurde ongestemde beiaard. Hij bestaat
uit 34 klokken uit messing, signaalklokken dus en geen beiaardklokken. Naar
vorm zijn ze niet verschillend van beiaardklokken: ze hebben eveneens de welgekende
'gotische rib'. Dit is het soort klok dat gebruikt wordt als scheepsklok, handklok,
alarmklok en soortgelijke signaleringsfunkties. Deze soort klokken hebben veel
sterker uitgesproken non-harmonisch spektrum, waardoor ze als 'onstembaar' worden
beschouwd. Dit neemt natuurlijk niet weg dat ze wel degelijk een goed onderscheidbare
luidtoon hebben en dat we ze in ons projekt ook wel degelijk naar toonhoogte
hebben opgehangen. Ze vormen een reeks binnen een interval van drie oktaven.
De klokken zijn onderling heterogeen: ze zijn gegoten in heel wat verschillende
gieterijen en ook hun leeftijd varieert van nieuw tot vroeg 19e eeuws. Daardoor
is de grootste en zwaarste klok niet automatisch ook de laagste klok van de
reeks. De toonhoogte van een klok hangt immers ook af van de dikte waarmee ze
werden gegoten. Een uit dunner materiaal gegoten klok zal lager klinken dan
een even grote klok met een grotere massa. Daartegenover staat dan weer, dat
naarmate de klok dikker wordt gemaakt ze ook luider zal kunnen klinken.

De klepels werden zorgvuldig individueel gekalibreerd en hebben een massa varierend
tussen 10% en 20% van de massa van de klok waarvoor ze zijn bedoeld. De klepels
worden aangedreven door overeenkomstig hun massa aangepaste elektromagneten
die een pulsbreedte gemoduleerd signaal toegevoerd krijgen. Hoe langer de bekrachtiginspuls
duurt, hoe groter de energie waarmee de klok wordt aangeslagen.Daardoor wordt
het mogelijk het instrument met dynamische schakeringen aan te sturen en te
bespelen.
<Belly> werd in de eerste versie uit 2002 bespeeld via een eigen laptop
komputer, maar deze kwam te vervallen bij de grondige vernieuwing van de hardware
zoals die werd doorgevoerd in 2006. Vanaf nu kan <Belly> dus rechtstreeks
met midi kommandos worden aangestuurd en bespeeld. Bij deze ombouw voorzagen
we meteen ook in een ingebouwde video-kamera waarvan het sinjaal op een BNC
uitgang ter beschikking staat. Deze kamera kan worden geschakeld via midi kontroller
67.
Midi mapping:
| Midi note byte |
Sounding pitch in fractional midi |
Hardware mapping
(Weidmuller)
|
Bell number |
Old Hardware mapping
(Belly 2002)
|
Coil voltage
48V=Pic 1
24V=Pic 2
|
Bell type or description |
way of striking |
| 68 |
69.54 |
5 |
0 |
28 |
48V |
ship 1841 |
clapper - blue coil
wav-sample
|
| 69 |
70.68 |
7 |
1 |
30 |
48V |
ship 1939 |
clapper - blue coil |
| 70 |
71.28 |
9 |
2 |
32 |
48V |
ship 1839 |
clapper -blue coil |
| 71 |
73.78 |
8 |
3 |
31 |
48V |
ship - silver |
hammer - blue coil
|
| 72 |
77.03 |
1 & 2 |
4 |
24 & 25 |
48V |
Brocksheid 30cm |
clapper - black coil |
| 73 |
77.74 |
11 |
5 |
34 |
48V |
ship xxx4 |
clapper - blue coil |
| 74 |
78.39 |
12 |
6 |
35 |
48V |
ship 1916 SkGoben |
clapper - blue coil |
| 75 |
79.56 |
10 |
7 |
33 |
48V |
ship 1827 |
clapper - blue coil |
| 76 |
80.17 |
10 |
8 |
57 |
24V |
round shape , rough |
hammer - red coil |
| 77 |
80.30 |
3 & 4 |
9 |
26 & 27 |
48V |
Brockscheid 27 cm |
clapper - black coil |
| 78 |
80.66 |
5 |
10 |
52 |
24V |
ship 1911 SkBremen |
hammer - red coil |
| 79 |
81.58 |
7 |
11 |
54 |
24V |
|
hammer - red coil |
| 80 |
82.06 |
6 |
12 |
29 |
48V |
Brockscheid 25cm |
clapper - blue coil |
| 81 |
82.10 |
8 |
13 |
55 |
24V |
Number 17 |
clapper - Red coil |
| 82 |
82.27 |
6 |
14 |
53 |
24V |
Dark bell |
hammer - red coil |
| 83 |
83.57 |
12 |
15 |
59 |
24V |
|
|
| 84 |
84.27 |
13 |
16 |
60 |
24V |
|
|
| 85 |
85.49 |
4 |
17 |
51 |
24V |
Schweiz |
hammer |
| 86 |
86.37 |
11 |
18 |
58 |
24V |
ship 1824 |
|
| 87 |
87.28 |
23 |
19 |
70 |
24V |
indian decorated |
hammer |
| 88 |
88.81 |
3 |
20 |
50 |
24V |
oval bell |
clapper |
| 89 |
89.72 |
16 |
21 |
63 |
24V |
|
|
| 90 |
90.92 |
14 |
22 |
61 |
24V |
gothic rib |
hammer |
| 91 |
90.76 |
17 |
23 |
64 |
24V |
|
|
| 92 |
91.64 |
13 |
24 |
36 |
48V |
Brockscheid |
clapper |
| 93 |
92.61 |
15 |
25 |
62 |
24V |
green bell |
clapper |
| 94 |
93.29 |
18 |
26 |
65 |
24V |
|
|
| 95 |
93.39 |
9 |
27 |
56 |
24V |
|
|
| 96 |
93.67 |
19 |
28 |
66 |
24V |
|
|
| 97 |
94.23 |
2 |
29 |
49 |
24V |
|
clapper |
| 98 |
95.55 |
20 |
30 |
67 |
24V |
|
|
| 99 |
96.05 |
21 |
31 |
68 |
24V |
Brockscheid decorated |
hammer |
| 100 |
97.00
|
24 |
32 |
71 |
24V |
heavy cast bell
|
hammer |
| 101 |
103.35 |
22 |
33 |
69 |
24V |
Highest G |
hammer |
| 102 |
n.c. |
|
n.c. |
48 |
n.c. |
|
|
| 120-123 |
yellow LED spots |
- |
- |
- |
- |
- |
- |
| 124-125 |
white E10 tungsten lites |
- |
- |
- |
- |
- |
- |
| |
|
|
|
|
|
|
|
Geimplementeerde midi-controllers:
123 of &H7B: all notes off (also switches off the lights)
66 of &H42: power ON/OFF
67 of &H43: Video camera ON/OFF
Program Change: values 0, 122-127 select different velocity scalings (programmable
via sysex). default is 122. 123-127 zijn momenteel niet ingevuld maar gereserveerd
voor uitbreiding.
Alleen geimplementeerd binnen de <GMT> midi file-player:
68 (=&H44): schakelt de listen-task om van absolute midi/klok mapping,
naar 'intelligente' mapping waarbij voor de gevraagde noot een geschikte klok
wordt gezocht. De controller moet worden gevolgd door een nul of een 1, al naargelang
de mapping absoluut dan wel intelligent moet zijn. De mate waarin bij intelligente
mapping toonhoogteafwijkingen mogen worden getollereerd, kan worden ingesteld
met controller 4.
4 (=&H04): pitch deviation tollerance. Deze kontroller moet worden gevolgd
door een waarde van 0 tot 100. Waarden groter dan 100 worden als gelijk aan
100 geinterpreteerd. Een setting van 100, komt overeen met een halve toon. 50
komt overeen met een kwarttoon. De default instelling is 20.
De mapping van de midi noten op de klokken en hun toonhoogtes ziet eruit alsvolgt:
Afmetingen & andere technische specifikaties:
- hoogte: 1390 mm
- breedte: 1100 mm (gemeten met de wielen naar binnen gedraaid).
- gewicht: 150 kg
- maximale geluidsdruk: ca. 102 dB (op 1 meter afstand, in fortissimo)
- elektrische aansluiting: 230 V ac - 350 Watt.
- data-poort: midi in. 3 x standard midi thru.
- Verzekeringswaarde: 12.000 Euro.
Design en konstruktie: dr.Godfried-Willem
Raes
Atelier medewerkers:
- Bert Vandekerkhove
- Moniek Darge
- Leonaar Degraeve
- Xavier Verhelst
- Kristof Lauwers
- Johannes Taelman
Bouwdagboek:
Omdat ons vaak wordt gevraagd hoeveel werk en tijd kruipt
in, en nodig is voor, het bouwen van een muzikale robot, hebben we voor <Belly>
een beknopt bouwdagboek bijgehouden:
- december 2001: eerste ideen en konkrete tekeningen
- 08.01.2002: principe layout besturingselektronika. Het kan analoog opgebouwd
worden als <Troms>, dus zonder dempers en zonder timerchips. Wel moeten
we uitgaan van een hogere voedingsspanning.
- 22.01.2002: experimenten met USB interfaces
- 05.02.2002: ontwerpen geschetst, mechanische opbouw.
- 06.02.2002: lasplan getekend: tetraederkonstruktie. Alle zijden 1 meter.
- 09-10.02.2002: inventaris voorhanden klokken. Ontbrekende exemplaren bijbesteld.
- 16-17.02.2002: wielbasis voor Belly gelast: zwenkwielen, op basisplaten
12mm dik staal. Wielvorken:L:50x50x5
- 18.02.2002: wielen besteld - Sluizeken.
- 27.02.2002: basisdriehoek gelast: 3/4" buis.
- 03.03.2002: montage driehoek voor besturingselektronika gelast (Uit L
profiel 30x30x3)
- 09.03.2002: tetraederkonstruktie hoofdvorm belly ineengelast. Buis 3/4",
alle zijden 1 meter.
- 10.03.2002: ophanging van de klokken waarop die ontbrak, gelast (M10 schroefdraad
op oogmoer voor klepel).
- 11.03.2002: de 4 bestelde klokken van de Eifeler Glockengiesserei werden
geleverd. Tegen de avond hingen ze al in Belly's tetraeder. Nu 9 klokken
opgehangen.
- 12.03.2002: montage beslissing: er komen 3 rijen van elk 9 klokken, dus
totaal 27 klokken.
- 13.03.2002: 15 klokken gemonteerd en opgehangen.
- 14.03.2002: 2e etage klokken afgewerkt. 3e etage, eerste rij afgewerkt.
Nu 23 klokken gemonteerd.
- 15.03.2002: 3e etage, tweede rij afgewerkt. Nu 26 klokken gemonteerd.
Eerste twee elektromagneten gemonteerd op gelaste stoeltjes. Voor de grootste
klok: Laukhuff 24N elektromagneet voor registertrakturen. De onderste etage
klokken zullen via de klepels worden gespeeld. De overbrenging tussen klepel
en elektromagneet gebeurt met riempjes. Dit bleek de beste toonvorming op
te leveren, in elk geval beter dan een mechanisme met hefbomen en beter
dan een rechtstreeks aanslaan van de klok met het verzwaard anker van de
elektromagneet.
- 16.03.2002: Alle elektromagneten voor de eerste etage op sokkeltjes gemonteerd
en afgewerkt. Negen klokken kunnen nu in principe elektrisch tot klinken
worden gebracht. Speurtocht rommelmarkt en brokantewinkels voor enkele ontbrekende
kleine klokjes levert niks op.
- 17.03.2002: Hoekklok blauwe elektromagneet 1e etage: voor vastzetten moet
de klok eronder worden losgemaakt. Het aanslaan gebeurt middels de klepel.
Verzonken M4 boutje gebruiken! Voor de sol klok werd een rode Laukhuff magneet
gebruikt, gemonteerd binnenin de klok. Deze klok wordt rechtstreeks aangeslagen.
Voor de kloppers op de rechtstreeks aangeslagen klokken oplossing gevonden:
gechromeerde messing sierknopmoeren met M5 schoefdraad ingesoldeerd. Het
soldeer zorgt voor voldoende aanslagmassa. Op twee klokken na, tegen de
avond, ook 2e etage van elektromagneten voorzien. In totaal zijn nu reeds
17 klokken gemechaniseerd.
- 18.03.2002: Assignatie klokken over voedingsspanningen en driver boards
uitgetekend. Voedingen herberekend na metingen trekkracht/stroomverbruik/impulsduur
voor reeds gemonteerde elektromagneten.
- 22.03.2002: wielen worden pas binnen 2 weken door De Coene geleverd...
- 23.03.2002: 1 klokje gevonden in brocante winkel
- 24.03.2002: 1 zwitsers (versierd) klokje gevonden op rommelmarkt. Nog
steeds kleine klokjes tekort. Speurtocht naar een Mi klokje.
- 29.03.2002: 2 klokjes gevonden op rommelmarkt: Do-sol , nog steeds geen
mi. Faktuur Brocksheid toegekomen en betaald.
- 30.03.2002: 2e etage klokken nu volledig voorzien van elektromagneten.
Derde etage klokkendragers afgewerkt. Op de derde etage, 2 elektromagneten
gemonteerd op de hoogste klokken.
- 31.03.2002: 3e etage alle klokken opgehangen. Do# klokje gevonden op rommelmarkt.
Belly heeft nu 29 klokken. Er moet nog een 4e etage bijkomen... Daar kunnen
maximaal nog 6 klokken op worden gemonteerd. De kleinste klokjes worden
bespeeld met Laukhuff magneten 12V - 75 Ohm/190mA nominaal, maar ook hier
bekrachtigd met 24 Volt in PWM. De wat grotere rode magneten zijn eveneens
12/14V/470mA types met een DC weerstand van 30 Ohm, ook hier aangestuurd
met 24V. De blauwe elektromagneten zijn 24V/410mA exemplaren met een DC
weerstand van 59 Ohm en aangestuurd met 48Volt.
- 01.04.2002: 3e etage alle klokken voorzien van elektromagneten. Nu 29
klokken geautomatiseerd. De klokken voor de top ontbreken nog. Kode voor
sturing Belly geschreven en toegevoegd aan g_n*h.dll in <GMT>.
- 03.04.2002: TIG laswerk voor chassis PC-circuit boards: 1 demultiplexer
board, 2 note-driver boards. Bestukking en soldering demultiplexerboard.
5V dc voeding op board gemonteerd. Solenoid driver boards: IRL640 type power
mosfets used. Latches: 74HCT574.
- 04.04.2002: Montage voedingsgedeelte. Inverter voor akkuvoeding ingekocht
(300Watt - 12V/ 230V)
- 05.04.2002: Voedingsgedeelte opnieuw ontworpen. Nu met 4 in serie geschakelde
Vicor DC-DC converters (elk 12V/ 8.5A).`
- 06.04.2002: assemblage van het elektronisch sturingsgedeelte. Dokumentatie
van de nieuw ontworpen schakelingen: power supply en pincode receiver. Test
van de voeding en de komparator.
- 07.04.2002: Hoog Fa klokje gevonden op rommelmarkt. Goed voor 4e etage.
Elektronisch gedeelte getest met nieuwe software in GMT. Bugs gevonden en
gedood. Mapping start nu op noot 24 in de hardware. De nootmappings 24-47
werken op 48Volt, terwijl 48-71 op 24 Volt werken. Basisplaat gelijkzijdige
driehoek ingelast in onderstel van Belly. Ophanging met 3/4" geplooide
buis. Rigid plooipomp gebruikt met buigmal voor 5 1/4" om een wat grotere
buigstraal te krijgen. De wielen kunnen nu vrij 360 graden draaien zonder
de schakelingen te raken. TIG toorts hersteld: Argon lek in aansluiting
op toorts veroorzaakte 'staalschuim' in de lasnaden. Bevestigingsbeugel
voor 2 12V akkus (elk 8.5Ah) gelast en op basisplaat met elektronika gemonteerd.
Onderstel in zinkoxide grondverf gestoken.
- 08.04.2002: Elektromagneetbeugels in zinkoxide grondverf geschilderd:
volledige demontage en remontage.Bedrading gemeenschappelijke + leidingen
(in lusvorm). Montage inox basisplaat voor inverter / battery charger. Elektronisch
gedeelte in platform gemonteerd. Een wiel volledig afgewerkt met doorlassing
ondermoeren op basisplaat. Nieuwe TIG toorts gekocht en in gebruik genomen.
- 09.04.2002: Bedrading 2e etage klokken. Begin montage 4e etage hoog Fa
klokje. Rondellen voor wielplaten ingekocht.
- 10.04.2002: klokje 4e etage ingelast en gemonteerd. Er steken nu 30 geautomatiseerde
klokken in Belly. Alle klokken bedraad en kabelboom gesoldeerd. Kabels samengebracht
met spirawrap.
- 11.04.2002: Test elektrische bedradingen. De UPS werkt o.k. Test komputerbesturing:
het werkt! Belly speelt zijn eerste noten... Opstelling lookuptables en
nameten toonhoogtes klokken. Bepaling minimum velocity en range voor elke
klok afzonderlijk.
- 12.04.2002: Extra hoog-mib klokje gevonden op rommelmarkt. Elektromagneet
gemonteerd en bedraad op 4e etage, frontaal links. Dit brengt het voorlopig
totaal aantal klokken op 31. Eindmontage klokken en mapping toonhoogtes
in hardware en software. Test interface verbeterd in GMT. Gewicht van sommige
klepels en kloppers verhoogd.
- 13.04.2002: TIG laswerk aan 4e etage. Bijstemmen van klokken. Extra klok
bijgemaakt en gemonteerd op 4e etage. Dit brengt het voorlopig eindtotaal
nu op 32 klokken. Er kunnen nog 1 of 2 klokken bij... Opmetingen velocity
uitsturing (minima en maxima) opgemeten en in de besturingsoftware als lookup
ingebracht. (cfr. kode module belly.inc)
- 14.04.2002: Versierd klokje gekocht in brocantezaak. Gemonteerd 4e etage
rechts. Belly heeft nu 33 klokken. Er kan er nog 1 bij... Software aangepast
en getest.
- 15.04.2002: <Belly> met takel opgehangen in atelier om gemakkelijker
aan de onderzijde te kunnen werken. Rondellen op draaipunten wielen gelast.
Bijvijlen vertikale wielassen. Belly demonstratie voor kompositiestudenten:
Thomas Smetryns, Kristof Lauwers, Barbara Buchowiec, Tom Haelvoet, Benjamin
Dousselaere, Daniel Pastene en Sam Verhaert. Metingen van hoofd en bijtonen
klokken met sinusgenerator gedemonstreerd. Kode voor demo stukje <Changes>
geschreven.
- 16.04.2002: Vertikale wielassen afgelast. Wielvorken definitief gemonteerd.
Harnas voor akkus afgewerkt. Schilderwerk wielvorken.
- 17.04.2002: Eerste opmeting grondfrekwenties klokken. Meetopstelling met
sinusgenerator, versterker, GMT-komputer en frekwentiemeter. Data ingebracht
in software. Problemen met stabiliteit sinusgenerator... Getemperd en juist
klinkende noten zijn: Klok4 = 77 (Fa), Klok12 = 82 (Sib), Klok22 = 91 (Sol),
Klok31 = 96 (Do). Alle andere vormen tusseninliggende tonen.
- 18.04.2002: Eerste demonstratieve muziekstukjes geschreven voor <Belly>:
Changes for Belly, Bellies en BellyMil. Midi listen procedures geschreven
en toegevoegd aan de DLL in GMT (g_n*.h.dll)
- 19.04.2002: Laatste klokje gemonteerd (wordt klok 33) . Eindtotaal: 34
klokken. Schilderwerk onderstel. Laatste wiel nog steeds niet geleverd.
- 20.04.2002: Wiel geleverd. Blijkt ander model en asmaat... De drie wielen
zullen veranderd moeten worden. Kode geschreven voor gesture control van
Belly. Kode voor arpeggio's geschreven in GMT. Opstelling voor premiere
van 23.04.2002.
- 21.04.2002: Test en rehearsal session. Tests en debug midi listen-tasks.
Maximum repetitie frekwenties opgemeten. Tests met Lily. Nearest-match listentask
geschreven in GMT.
- 22.04.2002: Bellies for Belly, afgewerkt en gerepeteerd.
- 23.04.2002: Onthulling van <Belly>, M&M koncert in de Logos
Tetraeder.
- 24.04.2002: levering definitieve wielen.
- TE DOEN: Permanente Molykote smering uitvoeren. Grondige opmeting toonhoogtes
hoofd en neventonen klokken voor software implementatie. Opmeting dynamisch
bereik in dB per klok uitvoeren,
- 02.06.2002: Belly verlaat voor het eerst - op eigen wielen- de logos tetraeder
en trekt naar het zondernaam plein aan de elektriciteitscentrale om er de
feestelijkheden rond de buurtwerking op te luisteren.
- 04.06.2002: Klok nr. 22 omgewisseld voor een beter klinkend exemplaar.
- 06.12.2002: UDP/IP besturing voor Belly geimplementeerd in GMT. Belly
kan nu ook via een netwerk worden bestuurd.
- 08.12.2002: kodering listentasks voor Belly in GMT vereenvoudigd. Er is
nu slechts 1 enkele listentask meer.
- 15.01.2003: Gestrobelly opnieuw gekodeerd voor bewegingsgestuurde beiaard.
- 11.03.2003: Radar sturing voor belly opgenomen in quadrada
kode.
- 14.02.2004: Belly kode opgenomen in Descent
(Technofaustus)
- 27.07.2004: New driver written in h_nih.dll/ g_noh.dll
- 26.08.2004: Belly pieces recorded for CD
(LPD012)
- 01.05.2005: CD (LPD012) now available
- 28.03.2005: bel nummer 32, indisch versierd klokje (re+) vervangen door
een do#, 97, goede kwaliteit zware gegoten klok.
- 29.03.2005: spektraal analyse bel 32. Update belly driver in GMT.
- 25.04.2006: Voorstudie ombouw naar sturing met PIC controllers: 11 x 48V
en 23 x 24V pulses nodig.
- 04.08.2006: De akkulader/inverter faalt en oscilleert. Ook de 3 loodakkus
blijken helemaal versleten en onoplaadbaar te zijn geworden.
- 06.08.2006: Een hele reeks (8 stuks) gestemde zilverbronzen klokjes afkomstig
uit een oude gevelcarillon gevonden op de gentse rommelmarkt.. Bij de geplande
ombouw van belly overwegen we de robot met deze nieuwe klokjes uit te breiden.
Ook lampjes kunnen bij de vernieuwing worden voorzien.
- 08.08.2006: Akkus verwijderd.. Ze waren helemaal vergaan....
- 09.08.2006: Twee PC pulse boards gesoldeerd voor de nieuwe rechtstreekse
midi implementatie. Deze maken gebruik van 18F4620 chips van Microchip.
Belly kan nu (teoretisch) uitgebreid worden tot 56 klokken..
- 10.08.2006: De nieuw verworven carillon klokjes werden alvast grondig
opgepoetst. De toonhoogtes in fraktionele midi zijn: 76.5, 78.5, 79.3, 81.4,
83.5, 84.5, 85.5, 86.5, 88.5, 90.5. De toevoeging aan Belly zou een grote
aanwinst zijn voor kwarttoonsmuziek.
- 11.08.2006: data in fractionele midi toegevoegd aan note-mappings tabel..
- 12.08.2006: Plasma snijden van een nieuwe gelijkzijdige driehoek draagplaat
in 3mm inox voor de montage van de nieuwe elektronika. (490mm zijde) Voorziening
voor 3 LED spotlights op de hoekpunten.
- 13.08.2006: afwerking TIG laswerk op het nieuwe inox chassis voor de elektronika.
Vier DIN pluggen gemonteerd met rivetten (1x midi in, 3x midi thru). 3-prong
net ingang en wipschakelaar (enkelpolig) gemonteerd. Ringkerntransfo 230V
- 2 x 23V/6.3A gemonteerd. Brugcel (15A) en twee elkos (10000uF) gemonteerd.
Drie lamphouders voor de LED spotllights vastgezet. met M3x10 inox inbus
boutjes op zadeltje van silikonenrubber (Loctite blauw).
- 14.08.2006: Na lang beraad, uiteindelijk toch maar een zuiver analloge
voeding gebouwd voor bellly. De ringtransfo levert 2 x 6A bij 24V. Mits
voldoende grote afvlakelkos (> 10mF) halen we makkelijk de beide spanningen
van 32V en 64V die stabiel blijft gedurende 25ms en zware belastingen. De
lookup's voor de velocity kunnen dan 30% korter worden genomen ten bate
van de respons- en repeteersnelheid van de hamers en klepels. Alleen de
voedingsspanning voor de LED lampjes (nominaal 12V ac) moet nu opnieuw berekend
worden. Gevoed vanuit de 32V spanning moet de serieweerstand liggen tussen
100 Ohm (voor ca. 160mA bij een brandspanning van 17V) en 400 Ohm (voor
ca. 60mA bij een brandspanning van 12V). Vandaag speelt <Belly> nog
voor de laatste keer mee bij <M&M> in de oude versie...
- 15.08.2006: Voorbereiding plaatsing nieuwe elektronika in Belly. Finalisatie
van het controller 66 circuit voor on/off schakeling met een philips kamrelais
voorzien van zes omschakelaars. We voorzien ook bleeder weerstanden voor
de ontlading van de elkos. Een daarvan moet geisoleerd tegenover massa gemonteerd
worden: de behuizing is met de negatieve pool verbonden.
- 16.08.2006: montage nieuwe elektronika. Lampjes: 3x gele LED spot, 12V,
6 x 36V/ 50mA. Video CCD kamera ingebouwd. Deze kan worden geschakeld via
midi kontroller 67.
- 17.08.2006: ontwerp kleine 12V voeding en chassisdeel met BNC konnektors
voor het video gedeelte.
- 18.08.2006: Video schakeling helemaal afgewerkt en gemonteerd op Belly.
Alleen de firmware voor de beide PIC's ontbreekt nu nog,
- 23.08.2006: Eerste PIC dank zij Johannes Taelman geprogrammeerd: de op
de hoogste spanning werkende bellen kunnen weer klinken. De lichtjes doen
het nog niet... De kode voor controller 66 doet het.

- 24.08.2006: Tweede PIC eveneens geprogrammeerd. Firmware voor PIC 1 aangepast
aan lichtjes. De mapping moet wel nog eens grondig gecheckt worden. De resolutie
voor de velocity scaling tabellen is 27.2 microsekonden. Een grote verbetering
tegenover de windows-implementatie waarbij de timing resolutie niet groter
kon zijn dan 1ms.
- 27.08.2006: GMT kode aangepast.
- 01.09.2006: PIC's opnieuw geprogrammeerd met betere velocity scaling tabellen
opgesteld door Kristof Lauwers. PIC formware door Johannes Taelman.
- 03.09.2006: Wielen wat dichter naar het zwaartepunt verplaatst. Wielvorken
beter afgewerkt. Het kantelgevaar bij het nemen van hellingen in de richting
van de zwaarste klokken is nu wel geringer geworden maar nog niet geweken.
Belly opnieuw gewogen en hoogte opgemeten.
- 16.09.2006: Aanpassing van alle bestaande kompositiekode onder GMT onder
gebruikmaking van de intelligente PlayBelly funktie, ter vervanging van
de in de vroegere laptop-driver implementatie gebruikelijke pitch deviation
controllers 4 en &H44. Deze laatste werden nu opnieuw geimplementeerd
in de GMT midi-fileplayer voor het robotorkest.
- 16.10.2006: LED spots vervangen door gele exemplaren. Mapping op notes
120, 121, 122.
- 17.12.2006: Lichtbesturingsfunkties aangepast in GMT.
- 19.09.2007: Foutjes in dokumentatie van de lampjes-mapping gekorrigeerd.
- 31.08.2008: Upgrade van de GMT testkode.
- 23.06.2010: Failure on one of the orange LED spotlights.
- 14.11.2010: All orange LED spotlights seem to fail now... The life expectancy
of 50000 h was definitly not met! It is less than 10000 h
- 28.11.2010: All orange/amber LED spotlights replaced
- 23.11.2011: Some of the traction ropes got too loose or broke. A repair
is required here.
- 13.12.2011: Traction ropes adjusted and repaired. The velocity scaling
for those bells may have changed now.
- 13.07.2018: <Belly> played on the opening of the Ghent Feasts at
Sint-Jacobs. It got a major part in my 'Rolands Round'.
- 30.08.2018: LED spotlights replaced with Xanlite 12V/ 200mA types (G4
socket) , supposed to last for 15 years, or 15000 hours.. Power consumption
2.2W, 2700 kelvin..
- 2019: Faillisement van de Eifeler Glockengiesserei (Blockscheid) waar
we de laagste klokken van <Belly> lieten gieten...
- 2021: Ook August Laukhuff ging over de kop...
- 01.07.2023: trakturen nagezien met het oog op het 11 juli koncert waarop
ook Rolands Round gespeeld moet worden.
- 14.09.2023-02.10.2023: <Belly> participeerde in de Zeroth Law produktie
in de Deutsche Oper Berlin. Enkele trakturen raakten los in het transport,
maar dit konden we simpel terplaatse herstellen.
- 03.02.2023: Transportschade vastgesteld: een van de elektromagneten raakte
verbogen door een singel in de vachtwagen, daardoor wist hij zich met een
hoek doorheen de isolatie van een naastliggende elektromagneet te drukken
en veroorzaakte daarin een kortsluiting. Gevolg: elektromagneet zwartgeblakerd
en helemaal doorgebrand...
 Verdere
schade te bepalen en later te herstellen.
Verdere
schade te bepalen en later te herstellen.
- 09.10.2023: Elektromagneet voor MIDI-noot 89 vervangen door een nieuw
exemplaar. De besturende MOSFET heeft het klaarblijkelijk niet begeven als
gevolg van de kortsluiting. De traktuurkoppeling moeten we wel nog wat beter
uitvoeren.
- 12.10.2023: <Belly> is weer helemaal gezond...
Last update: 2023-10-26
by Godfried-Willem Raes
Elektromagneten:
- 24V types, aangestuurd met 70V:
- 2 stuks: Laukhuff, bipolair type, 24V/ 1A (24W, 24 Ohm, per wikkeling)
- 7 stuks: Laukhuff Traktuurmagneten, 24V, 0.5A (Blauw)
- 12V types, aangestuurd met 35V:

{kind=link}