|
Pianet Robot Research project on the development of new tools for musical expressionnt |
|
<Pianet>
an automated Hohner Pianet-T dr.Godfried-Willem RAES 2021-2024 |
|
Pianet Robot Research project on the development of new tools for musical expressionnt |
|
<Pianet>
an automated Hohner Pianet-T dr.Godfried-Willem RAES 2021-2024 |
<Pianet>
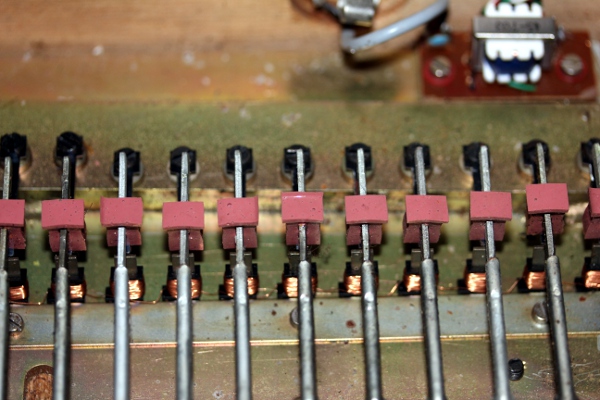
An automated Hohner 'Pianet'. This instrument is a five octave keyboard instrument
using tuned steel blade springs, clamped at one end, as tone generators. At
rest, a rubber damper rests on the springs. This rubber damper is released as
soon as a key is depressed. The attack of the sound can be influenced by the
speed and force wherewith the key is depressed. So it is touch sensitive to
a certain extend. However, due to the electromagnetic pick-ups (small solenoids
wound on a permanent magnetic core, all coils connected in series) , the sound
is quite one-dimensional and in that respect similar to the electric guitar.
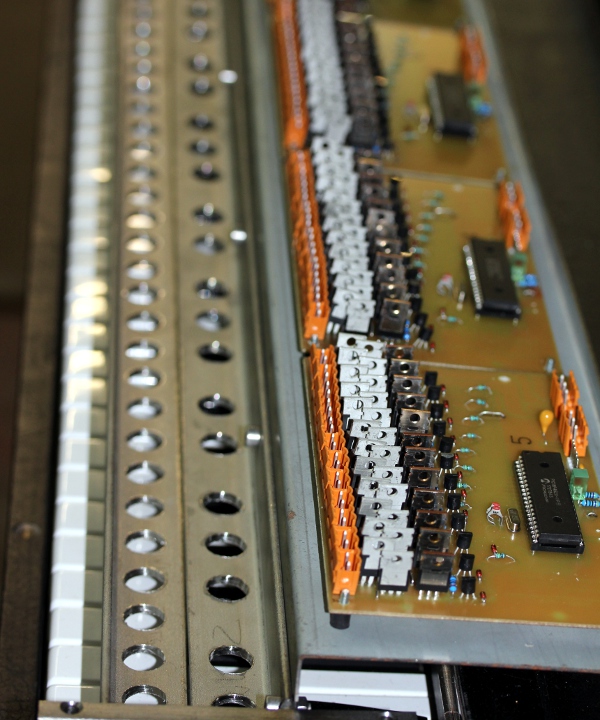
On this picture the mechanism can clearly be seen:  The
electromagnets (transducers) and their series connection are clear on this picture:
The
electromagnets (transducers) and their series connection are clear on this picture:
The circuit used to implement velocity sensitivity came out like this:  This circuit being identical to the one used for earlier robots such as
<RorO>, <Pos>, <Per>,
<HarmO>, <Qt>...
we do not give any comments here but ask the interested reader to consult the
web-pages dedicated to these older projects.
This circuit being identical to the one used for earlier robots such as
<RorO>, <Pos>, <Per>,
<HarmO>, <Qt>...
we do not give any comments here but ask the interested reader to consult the
web-pages dedicated to these older projects.
Here is an overview over the circuitry:  The solenoids used here have an external return spring compensating for the
weigth of the anchor at rest. At the push side we gave them the 'fingers' we
designed long ago for our player piano. Here is a picture of the prepared solenoids
before mounting on the chassis:
The solenoids used here have an external return spring compensating for the
weigth of the anchor at rest. At the push side we gave them the 'fingers' we
designed long ago for our player piano. Here is a picture of the prepared solenoids
before mounting on the chassis:  The solenoids are rated for 12V operation
The solenoids are rated for 12V operation
The midi implementation was worked out such as to make this robot compatible with existing midi files for our player piano. Hence the use of midi channel 0. The note repetition mechanism also is compatible with our player piano. However, the mechanics of this instrument being fundamentally different than those of a piano, one cannot expect the velocity scaling to be compatible with that of the piano. Of course we dropped all support for a pedal, as this instrument does not have one. Technically speaking it would even be impossible to provide a pedal in this case.
Source code and hexdumps for the PIC microcontrollers:
| board | processor | source code | hex-dump | PCB file |
| Hub/parser | 18F2620 | Pianet_Hub.bas | Pianet_hub.hex | PCB_Pianet_Hub.gif |
| Board1 | 18F4620 | Pianet_PH.bas | Pianet_PH1.hex | PCB_12PH.gif |
| Board2 | 18F4620 | id. | Pianet_PH2.hex | id. |
| Board3 | 18F4620 | id. | Pianet_PH3.hex | id. |
| Board4 | 18F4620 | id. | Pianet_PH4.hex | id |
| Board5 | 18F4620 | id. | Pianet_PH5.hex | id. |
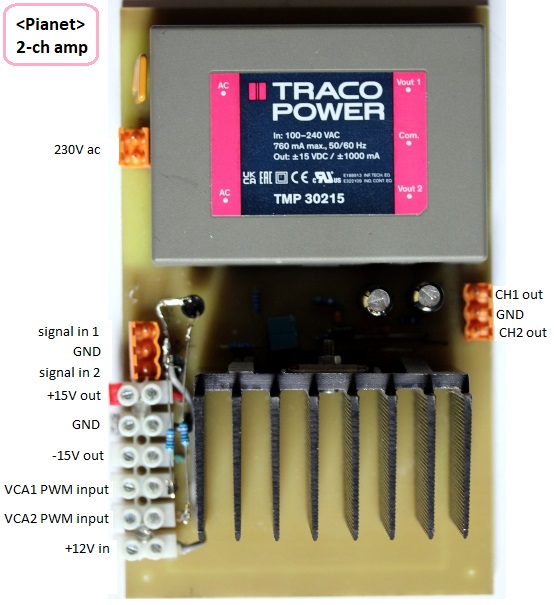
In 2024 we decided to add internal amplification and speakers to this robot such that it could become a stand-alone robot not requiring any external equipment. This lead to the addition of two new controllers in the midi implementation: controller #7, for volume and controller #10 for panning, in this case steering the amplitude relationship between the front and back Altec dome speaker. The design of the PWM-controlled volume makes use of two fast Silonex vactrols. This is the circuitry used:
Note-off, no release
Note-on, velocity implemented
Key pressure: used for automatic note repeats. Each note can be programmed with an individual repetition rate. Key pressure can also be used to modify light flashing speed.
Lights:
Controllers implemented:
#6: Leslie tremolospeed: amplitude modulation of alternating front and back speakers. This mechanism overrides the panningcontroller #10. Default setting: OFF.
#7: With the internal the audio system connected, this controller can be used to steer global volume of the amplifiers. By default this controller is 0, so sending it prior to playing is a requirement.
#10: This controller steers the 'panning' between the front and the back speaker. By default this controller is set to 64.
#30: Global repetition rate controller. Value 0 disables repetitions. Note that repetitions will be synchronous and in sync only if the notes to which they are applied start at the same time. By default set to OFF.
#66: Power on/off switch. This resets controllers and switches the power supplies for the solenoids. Value 0 switches OFF, any other value is ON. Switching this controller also resets all controllers to their default values on cold boot.
#69: Switches automation of the lights on or off. Values 1 to 7 select different light mappings. Value 0 switches the mechanism off. By default, automation is switched ON.
#123: All notes OFF. (Includes the lights).
Program change: not implemented
Channel aftertouch: not implemented
Pitch Bend: not implemented
Technical specifications:
Design and construction: dr.Godfried-Willem Raes
Collaborators on the construction of this robot:
Music composed for <Pianet>:
none specific sofar. However, <pianet> is often used for concerts at venues that do not have a piano available. It also can replace the spinet (<Spiro> as well as <Sper>) in quite a few orchestrations.
Pictures taken during the construction in our workshop:






| Back to Main Logos page:index.html | To Godfried-Willem Raes personal home page... | To Instrument catalogue |  |
<Pianet>
Dit automatiseringsprojekt ging van start op vraag van Alain Van Zeveren. Het maakte oorspronkelijk dan ook geen deel uit van ons grote projekt rond de bouw en ontwikkeling van het robotorkest bij Stichting Logos. De belangrijkste reden waarom voor dit projekt geen plaats was binnen het robotorkest, heeft te maken met het werkingsprincipe van dit instrument dat, hoewel het geluid veroorzaakt wordt door vrij trillende stalen tongen, immers onmogelijk kan klinken zonder toepassing van een externe versterker en dito luidspreker. De afwezigheid van luidsprekers voor versterking was nu eenmaal een paradigma achter het Logos robotorkest.
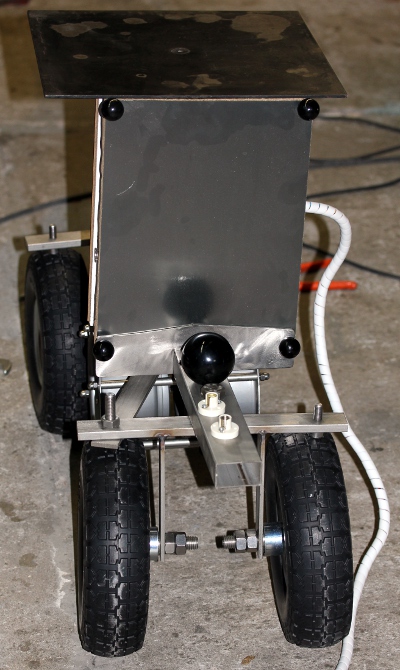
Niettemin, omdat na de automatisering van het Hohner pianet, het projekt wat verweesd in onze werkplaats was achtergebleven, beslisten we het toch tot een autonome robot uit te bouwen en af te werken. Dus ontwierpen we een deugdelijk wielstel met kruisdisselbesturing evenals een versterkersystreem uitgerust met twee antieke University Sound -de voorloper van JBL-Altec- speakers. De <Pianet> robot kan nu worden ingezet op plaatsen waar een beroep gedaan wordt op het robotorkest maar waar geen vleugelpiano aanwezig is. Ook als vervanger voor het spinet, is het erg geschikt.
Bouwdagboek - Construction & Research Diary:
 Dit is het mechanisme:
Er zit duidelijk wat korrosie (roest) op de veerstalen toonlamellen. Wegnemen
van het roest dreigt wel de stemming in diskrediet te brengen. De tongen zijn
met een instelboutje bevestigd op kleine cyclindrische permanente magneten.
Dit is het mechanisme:
Er zit duidelijk wat korrosie (roest) op de veerstalen toonlamellen. Wegnemen
van het roest dreigt wel de stemming in diskrediet te brengen. De tongen zijn
met een instelboutje bevestigd op kleine cyclindrische permanente magneten.
 Daardoor zijn de lamellen
zelf magnetisch. In rust duwen zachtrubberen dempers de tongen uit hun evenwicht.
Via de toetsen worden de dempers van de tong weggetrokken waardoor die vrij
kan gaan trillen. De trilling wordt omgezet in een elektrisch signaal met
kleine spoeltjes die vlakbij het uiteinde van de tongen zijn aangebracht.
Alle spoeltjes zijn in serie geschakeld en om-en-om gewikkeld.
Daardoor zijn de lamellen
zelf magnetisch. In rust duwen zachtrubberen dempers de tongen uit hun evenwicht.
Via de toetsen worden de dempers van de tong weggetrokken waardoor die vrij
kan gaan trillen. De trilling wordt omgezet in een elektrisch signaal met
kleine spoeltjes die vlakbij het uiteinde van de tongen zijn aangebracht.
Alle spoeltjes zijn in serie geschakeld en om-en-om gewikkeld. 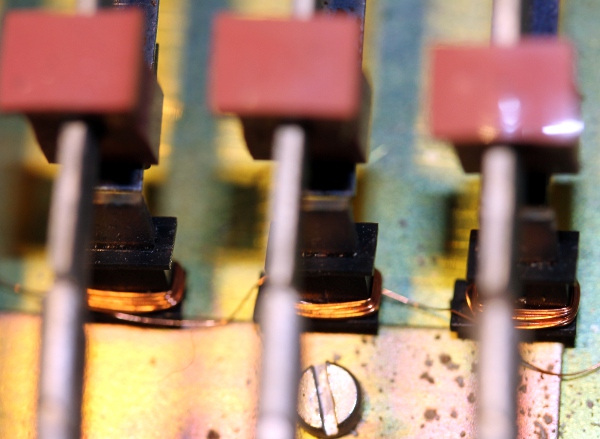 Een
kleine audio transformator staat in voor de impedantieaanpassing naar een
instrumentversterker ingang.
Een
kleine audio transformator staat in voor de impedantieaanpassing naar een
instrumentversterker ingang. 
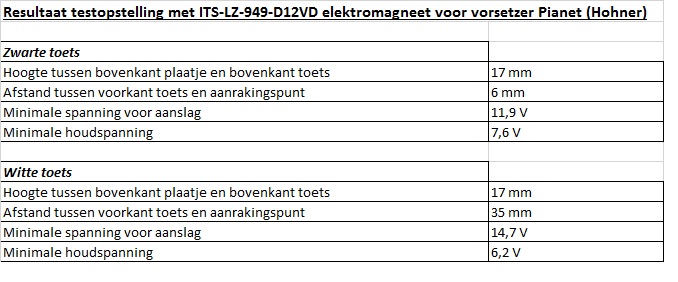 Voor deze metingen
werden niet gemodificeerde elektromagneten gebruikt, dus, voorzien van de
terugkeerveer en zonder neopreen vingertjes. Weidmueller
konnektors besteld bij Farnell.
Voor deze metingen
werden niet gemodificeerde elektromagneten gebruikt, dus, voorzien van de
terugkeerveer en zonder neopreen vingertjes. Weidmueller
konnektors besteld bij Farnell.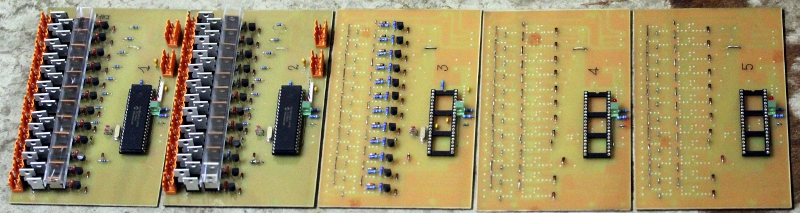 En toen vielen we zonder onderdelen voor print 5...
En toen vielen we zonder onderdelen voor print 5...
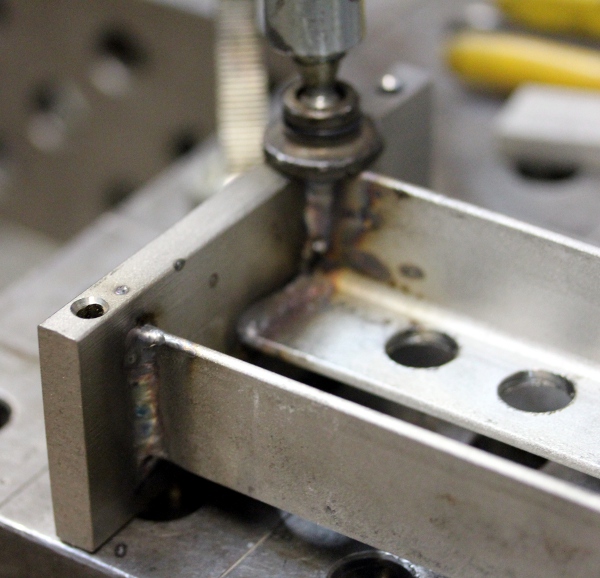
 Alle laswerk uitgevoerd met manuele TIG op de lastafel. Koeling met perslucht.
Alle laswerk uitgevoerd met manuele TIG op de lastafel. Koeling met perslucht. De
vingertjes waren ontworpen voor ankerstaafjes van 3 mm. De hier gebruikte
elektromagneten hebben echter staafjes van 2.4 mm diameter. Een stukje van
10 mm krimpkous rond die staafjes volstaan om ze ook hier te kunnen toepassen.
Weidmueller 2-polige stekkerkonnektors besteld. We hebben er 60 nodig... behoorlijk
duur. Montage van de PCB's op een geplooid stuk staalplaat met Ettinger M3
schokdempertjes.
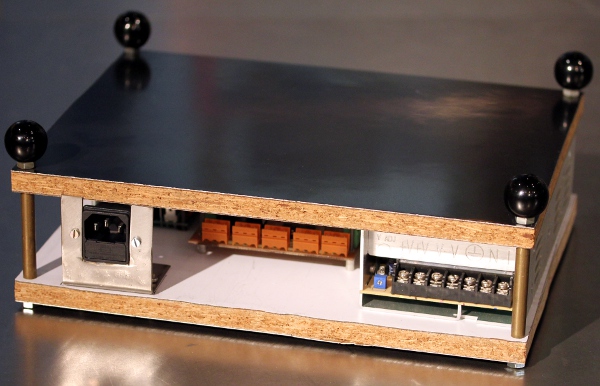
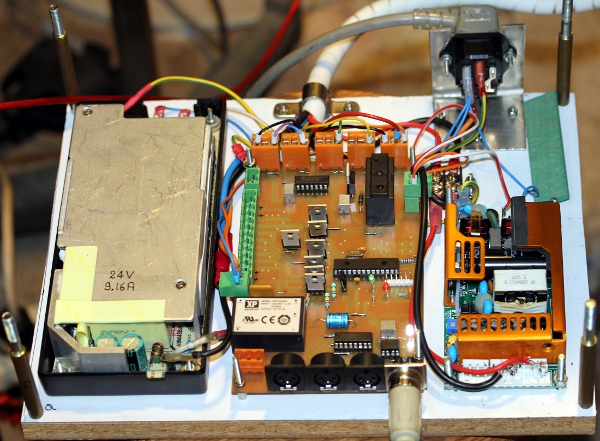
De voedingen en het midi-hub board komen in een afzonderlijke behuizing die
onder het instrument kan worden geplaatst.
De
vingertjes waren ontworpen voor ankerstaafjes van 3 mm. De hier gebruikte
elektromagneten hebben echter staafjes van 2.4 mm diameter. Een stukje van
10 mm krimpkous rond die staafjes volstaan om ze ook hier te kunnen toepassen.
Weidmueller 2-polige stekkerkonnektors besteld. We hebben er 60 nodig... behoorlijk
duur. Montage van de PCB's op een geplooid stuk staalplaat met Ettinger M3
schokdempertjes.
De voedingen en het midi-hub board komen in een afzonderlijke behuizing die
onder het instrument kan worden geplaatst.

 Montage
van alle 60 elektromagneten op het chassis en aansluiiting ervan op de PCB's
met tweepolige Weidmueller konnektors. Waarom die nu zwart zijn i.p.v. het
vroegere oranje, mag Joost weten.
Montage
van alle 60 elektromagneten op het chassis en aansluiiting ervan op de PCB's
met tweepolige Weidmueller konnektors. Waarom die nu zwart zijn i.p.v. het
vroegere oranje, mag Joost weten. Aanmaak van de multikabel
en bedrading van de konnektor. We maken deze kabel 1 meter lang, een kompromis
tussen wendbaarheid (zo lang mogelijk...) en elektronische betrouwbaarheid
(zo kort mogelijk..).
Aanmaak van de multikabel
en bedrading van de konnektor. We maken deze kabel 1 meter lang, een kompromis
tussen wendbaarheid (zo lang mogelijk...) en elektronische betrouwbaarheid
(zo kort mogelijk..).
 De
dimensionering van de RC kring (hier getekend als 10nF en 1M) moet experimenteel
uitgezocht worden in funktie van de schakelkurves van de gebruikte MOSFET's.
Dat gedrag is immers allesbehalve linear. De diodes moeten minstens Schottky
types zijn en zelfs germanium diodes kunnen hier in aanmerking komen.
Het BAT86 type heeft een spanningsval van slechts 225 mV.
De
dimensionering van de RC kring (hier getekend als 10nF en 1M) moet experimenteel
uitgezocht worden in funktie van de schakelkurves van de gebruikte MOSFET's.
Dat gedrag is immers allesbehalve linear. De diodes moeten minstens Schottky
types zijn en zelfs germanium diodes kunnen hier in aanmerking komen.
Het BAT86 type heeft een spanningsval van slechts 225 mV.
 Het ruisnivo van deze schakeling laat echter veel te wensen.
Het ruisnivo van deze schakeling laat echter veel te wensen.

 De
12V voeding moeten we wel nog toevoegen en monteren. Ze is vooral nodig wanneer
we de robot ook nog van enkele LED-lichtjes willen voorzien. Strips boven
het mechanisme zou mooi kunnen zijn. Gezien de volkomen onlineaire en tamelijk
grillige karakteristiek van het weerstandverloop van de NSL32SR3, zal het
aangewezen zijn om in de firmware de resolutie van de PWM aansturing op 10
bits te brengen in plaats van de gebruikelijke 8-bit resolutie die we tot
hiertoe meestal toepasten op deze 8-bit processoren. Indien nodig of nuttig,
ontwierpen we ook een gelijkaardig board waarop Weidmueller konnektors de
in het prototype gebruikte kroonluchtersteentjes vervangen. Door gebrek aan
middelen nemen we dit voorlopig echter niet in produktie.
De
12V voeding moeten we wel nog toevoegen en monteren. Ze is vooral nodig wanneer
we de robot ook nog van enkele LED-lichtjes willen voorzien. Strips boven
het mechanisme zou mooi kunnen zijn. Gezien de volkomen onlineaire en tamelijk
grillige karakteristiek van het weerstandverloop van de NSL32SR3, zal het
aangewezen zijn om in de firmware de resolutie van de PWM aansturing op 10
bits te brengen in plaats van de gebruikelijke 8-bit resolutie die we tot
hiertoe meestal toepasten op deze 8-bit processoren. Indien nodig of nuttig,
ontwierpen we ook een gelijkaardig board waarop Weidmueller konnektors de
in het prototype gebruikte kroonluchtersteentjes vervangen. Door gebrek aan
middelen nemen we dit voorlopig echter niet in produktie.
| (Terug) naar logos-projekten: | Terug naar Logos' index-pagina: | Naar Godfried-Willem Raes personal homepage... | Naar katalogus instrumenten | |
M&M orkest |
Last update: 2025-07-13 by Godfried-Willem Raes
The following information is not intended for the general public nor for composers wanting to make use of the <Pianet> robot, but is essential for maintenance and servicing of the robot by our clients and collaborators. It also might be usefull for people that want to undertake similar projects.
Technical drawings, specs and data sheets:
Power supplies:
Fuse in the power entry: 4 A. A spare fuse can be found in the little drawer.
Wiring & circuit details midihub board:
By changing the jumper on this board it is possible to select between parsed midi mode (1 ms delay) and direct mode. Direct mode may lead to much higher jitter on the timing precision, depending on overall midi density. The protection diodes (1N4007) for inductive loads have been ommitted in the practical realisation as the mosfets are only used to switch lights here.
PCB for this board:
Circuit details solenoid driver board:
board 1 using 12 IRF620 MOSFET's for the pulses
board 2 using 10 IRF530 MOSFET's for the pulses, 1 IRF540, 1 IRF1310
boards 3 to 5 using 12 IRF3710 for the pulses
All boards use IRL640 for the holds.
summary of data-sheet values for MOSFET's used:
| type | Umax | Imax | Ug | RdsON | Ci |
| IRF530 | 100V | 14A | 10V | 0.18 Ohm | |
| IRF540 | 100V | 28A | 10V | 0.08 Ohm | 1.7nF |
| IRF620 | 200V | 5A | 10V | 0.8 Ohm | |
| IRF1310 | 100V | 24A | 10V | 0.036 Ohm | 1.9nF |
| IRF3710Z | |||||
| IRL640 | 200V | 18A | 5V | 0.18 Ohm | 1.7nF |
| IRLZ34 | 55V | 30A | 5V | 0.046 Ohm | 880pF |
| FQPF20N06E | 60V | 15A | 3V |
If repair and replacement is required, all N-channel mosfet's can be replaced with IRL640 types.
Solenoids: Intertec ITS-LZ-1949-D-12V. Datasheet. Nominal voltage: 12V , Power: 7W (Hence Rdc= 20.57 Ohm). With the 9V hold-voltage only, the current drawn is 437 mA. During the velo-pulse, current rises to 1.6 A.
Audio amplifier circuit:
PCB:
Mechanical construction drawings and welding plan:
Tentative cost calculation:
| tubular solenoids: |
60
|
13,50-
|
810,-
|
| PCB's P/H boards: |
5
|
250,-
|
1.250,-
|
| Hub board |
1
|
200,-
|
200,-
|
| Power supply: 9V - 11A |
110,-
|
110,-
|
|
| Power supplies 24V - 6A / 9A |
210,-
|
210,-
|
|
| Chassis Vorsetzer |
200,-
|
200,-
|
|
| Konnektors 2pole Weidmueller |
60
|
1,60-
|
96,-
|
| Ettinger M3 shock absorbers |
20
|
3,60-
|
72,-
|
| Rubber fingers |
60
|
2,80-
|
168,-
|
| Metal plated wood |
1
|
8,20-
|
8,20-
|
| M6 bakeliet knoppen |
4
|
2,70-
|
10,80-
|
| Material cost estimate |
3.800,-
|
Labor (estimated at 4 weeks): 6.300,-
Total estimated cost: 10.100,- [16.12.2021]
Additional costs for the construction of the trolley and the amplifier system:
6.000,-
Total estimated end cost: 16.100,- Euro.
References:
Raes, Godfried-Willem, "Expression control in musical automates", 1977/2025,
![]()
