<4Pi>
<Fourpi>
<4¶>

an experimental electroacoustic microtonal organetto using electromagnetic
membrane driven conical pipes
Godfried-Willem Raes
2022
|
<4Pi> <Fourpi> <4¶>
|
<4Pi>
This organ robot builds further on the experiences gained during the development and evaluation of our tiny <Pi> robot built in 2017, the reduced ambitus <2Pi> robot built in 2018 and the small regal robot <3Pi> built in 2022. It belongs again to the family of robots designed by us, using membrane driven organ pipes. Other robots, members of this same family are <HybrLo>, <Hybr>, <HybrHi>.
Just like for <3Pi>, this one was designed to use conical resonators. In this case though these were dimensioned for maximum resonance and we did not save on length. These resonators are not strictly tuned, as the tuning is merely dependent on the membrane, but they are used and adjusted to obtain the specific timbre for the register. In traditional organ building, one may encounter such resonators on reed pipes as 'full length', 'half length' or quarter length, but the exact lengths are not tuned. Trumpets with full length resonators do sound really powerfull. As the cones are taken shorter and wider, the tone becomes more sharp and piercing.
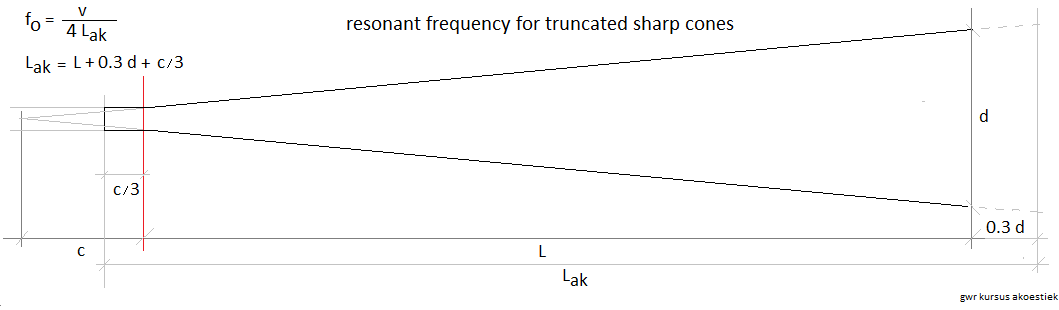
For this project, as for <3Pi>, we wanted a rather sharp opening angle in order to improve on the lower partials. In order to be able to calculate the most suitable scaling for the resonators, we first made a few test pipes with different lengths but constant cone angles, for measurement:

For the longer pipes we made use of brass, as this saves a lot on weigth and its quite a bit more stable than traditional pipe metal containing lead. The value to be taken for c, after a series of measurements, came out a ca. one thirth of c. It therefore seems that the pipe at the truncation of the cone, behaves as if the cone is coupled to a cylinder with the same volume as the virtual cone with length c. Hence our finding that Lak = L + 0.3d + c/3. Here is an improved drawing, at the base of our final calculations:
Using cone resonators it became clear that we could design this instrument
to sound a full octave below <3Pi>, without loosing too much in amplitude.
Contrary to what is found in textbooks on acoustics, these pipes sound as quarterwavelength
pipes. The resonances at overtones for our 261Hz pipe were vaguely found to
be: fo= 261Hz, f1=530Hz, f2=790Hz, f3= 920Hz, f4= 1310Hz and f5=1580Hz. So,
more or less a n=1,2,3,4,5... series.
Just as in the other Pi-series robots, here we again used tiny electromagnetic
buzzers, type ABT-408-RC costing only about one Euro a piece, but as the power
of these buzzers is very small, a really powerfull sound was out of scope here.
The cone resonators were made from brass for the lowest pipes and for the higher
ones from traditional organ pipe metal, an Sn-Pb alloy, and soldered on a cone
former mandrel. The special extruding tool we made for <Pi> could be used
again to make the rectangular opening at the small end of the resonators. The
sound of the pipes thus formed is quite reedy, as was to be be expected from
metal membranes, and thus compares quite well to a soft regal.
For driving and tuning the buzzers we designed a circuit build around the microchip Pic 24EP128MC202 microprocessor, in fact a chip developed as a dedicated 3-phase motor controller. The circuits are in principle identical to the ones used for <Pi> and <3Pi>, but the PCB boards were redesigned and improved on some details. Here we have three PCB's, each serving 18 notes. All sound synthesis is handled in the digital domain using PWM techniques. On each processor chip, three 16-bit timers are used to generate the required pitches with variable duty cycles. The three PWM channels working at a base frequency of >300kHz are used for the envelope control of each individual note by multiplying their output with the variable duty cycle square wave signal from the tone generators. No low pass filtering was applied, as all possible artifacts are situated well above the normal auditory perception range. Moreover, the coils driving the membranes serve as an intrinsic low pass filter due to their inductance (903 uH). We considered using analog control for the global volume control of the instrument as the power supply voltage for the buzzers controls directly the sound volume leading to a possibly better resolution in dynamics. However, after some experiments we dropped the idea mainly because it would introduce a high risk of overloading the buzzers if the instrument were given in the hands of not knowledgeable musicians. The current through the buzzers should be limited to 75 mA. Instead, we implemented a global level controller (#7) in the firmware using PWM at 300 kHz. The dynamic range is limited to 9 bits, or ca. 54 dB.
Here is the circuit design (shown for 3 notes only, but the practical circuit on a single 100 x 233.4 mm board, houses 6 processors, good for 18 notes):
The Bourns trimpot resistors in series with the load in the circuit are used to balance the non-linearity of the frequency response of the sounders. Their value increases as the resonant frequency is approached. Complete detailed circuit drawings are given at the bottom of this page. In this version, we used multiturn trimpots such that balancing becomes more comfortable as compared to <Pi> were we soldered in selected fixed value resistors. The MOSFETS used here were selected to operate on a 2.5V gate voltage such that they can be fully driven with the outputs of the AND-gates. Mosfet types that can be used are: FQPF20N06L, IRLZ34N and most certainly quite a few more. We remain open for suggestions for more suitable through hole types in this application..
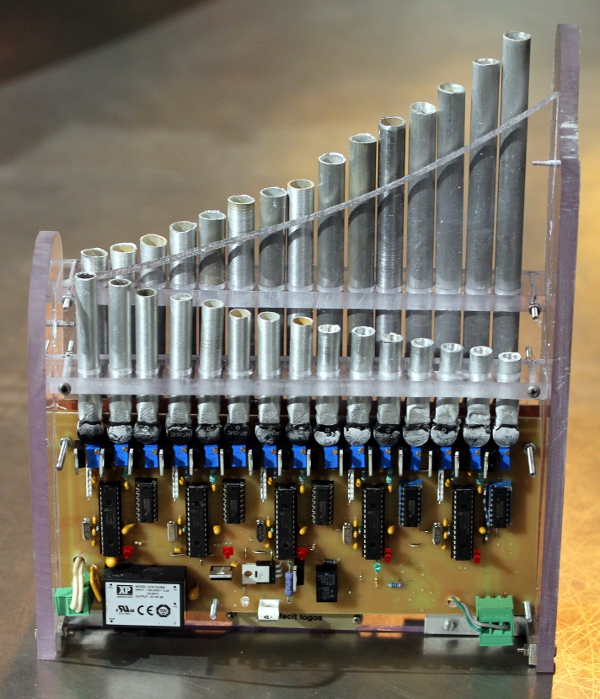
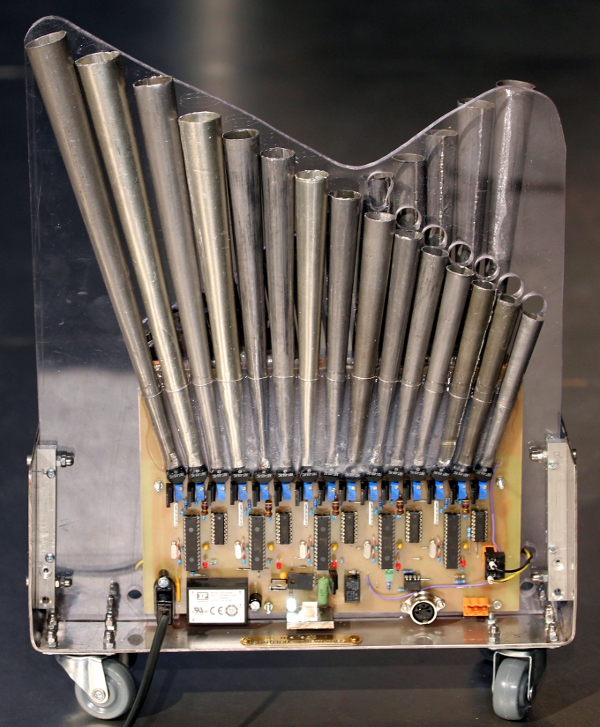
The complete robot consists of just three PCB's in the format 100 x 233 mm, each holding six 16-bit PIC microprocessors. Here is an overview:
As each PCB houses 6 PIC microcontrollers , there are 18 controllers to write firmware for.
To make and calculate the required conical pipe resonators we first made a bunch of test-pipes of different lengths and measured them out carefully using our Tektronix arbitrary function generator. After collecting the data, we wrote a small computer program to calculate by logarithmic interpolation the required pipe lengths for the practical instrument. It was observed that the pipes resonate as 1/4 wavelength resonators for all pitches below the resonant frequency of the buzzers. As for the highest notes the cones became too short to sound well, we decided to construct all the pipes on the second board, as 1/2 lambda resonators.
Definitive pipes as made, tuned and measured for <4Pi>:
| freq = f0 | L | Lambda / 4 | R-trimpot | Z | wiring color | |
| Board 1 | Hz | mm | mm | Ohm | Ohm | |
| 43 | 97 | 795 | 878 | 50 | 7.0 | orange |
| 44 | 103 | 747 | 829 | 50 | 7.0 | yellow |
| 45 | 110 | 702 | 783 | 50 | 7.0 | green |
| 46 | 116 | 659 | 739 | 50 | 7.1 | blue |
| 47 | 123 | 619 | 697 | 50 | 7.1 | purple |
| 48 | 130 | 581 | 658 | 50 | 7.2 | grey |
| 49 | 138 | 545 | 621 | 50 | 7.2 | white |
| 50 | 146 | 511 | 586 | 50 | 7.3 | black |
| 51 | 155 | 479 | 553 | 50 | 7.4 | brown |
| 52 | 164 | 449 | 522 | 50 | 7.4 | pink |
| 53 | 174 | 421 | 493 | 50 | 7.5 | orange/black |
| 54 | 184 | 394 | 465 | 50 | 7.5 | yellow/black |
| 55 | 195 | 368 | 439 | 20 | 7.6 | green/yellow |
| 56 | 207 | 345 | 414 | 20 | 7.7 | blue/grey |
| 57 | 220 | 322 | 391 | 20 | 7.7 | pink/black |
| 58 | 233 | 301 | 369 | 20 | 7.8 | red/yellow |
| 59 | 246 | 280 | 348 | 20 | 7.9 | white/red |
| 60 | 261 | 261 | 329 | 20 | 8.0 | red/black |
| Board 2 | l/4 -- l/2 | |||||
| 61 | 277 | 264 | 310 | 22 | 8.0 | orange/red |
| 62 | 293 | 247 | 293 | 22 | 8.1 | |
| 63 | 311 | 479 | 276 | 22 | 8.2 | |
| 64 | 329 | 449 | 261 | 22 | 8.3 | |
| 65 | 349 | 421 | 246 | 22 | 8.4 | |
| 66 | 369 | 394 | 232 | 22 | 8.6 | |
| 67 | 391 | 368 | 219 | 22 | 8.7 | |
| 68 | 415 | 345 | 207 | 22 | 8.8 | grey |
| 69 | 440 | 322 | 195 | 22 | 9.0 | white |
| 70 | 466 | 301 | 184 | 22 | 9.1 | black |
| 71 | 493 | 280 | 174 | 21 | 9.3 | |
| 72 | 523 | 261 | 164.6 | 21 | 9.4 | |
| 73 | 554 | 244 | 155.4 | 21 | 9.6 | |
| 74 | 587 | 227 | 146.6 | 21 | 9.8 | |
| 75 | 622 | 211 | 138.4 | 20 | 10.0 | |
| 76 | 659 | 196 | 130.7 | 20 | 10.2 | |
| 77 | 698 | 181 | 123.3 | 20 | 10.4 | |
| 78 | 740 | 168 | 116.4 | 20 | 10.7 | |
| Board 3 | ||||||
| 79 | 784 | 155 | 109.8 | 10 | 10.9 | |
| 80 | 831 | 143 | 103.7 | 10 | 11.2 | |
| 81 | 880 | 132 | 97.9 | 10 | 11.5 | |
| 82 | 932 | 121 | 92.4 | 10 | 11.8 | |
| 83 | 988 | 111 | 87.2 | 10 | 12.0 | |
| 84 | 1046 | 102 | 82.3 | 10 | 12.4 | yellow / black |
| 85 / 97 | 1109 | 244 | 77.7 | 10 | 12.8 | |
| 86 / 98 | 1175 | 227 | 73.3 | 10 | 13.1 | |
| 87 / 99 | 1244 | 211 | 69 | 10 | 13.5 | |
| 88 / 100 | 1319 | 196 | 65 | 10 | 13.9 | |
| 89 / 101 | 1397 | 181 | 61.6 | 10 | 14.4 | |
| 90 / 102 | 1479 | 168 | 58 | 10 | 14.8 | |
| 91 / 103 | 1567 | 155 | 54 | 10 | 15.3 | |
| 92 / 104 | 1661 | 143 | 51 | 10 | 15.9 | |
| 93 / 105 | 1760 | 132 | 48 | 10 | 16.5 | orange |
| 94 / 106 | 1864 | 121 | 46 | 10 | 17.0 | yellow |
| 95 / 107 | 1975 | 111 | 43 | 10 | 17.7 | green |
| 96 / 108 | 2093 | 102 | 41 | 10 | 18.4 | blue |
An extra feature of <Pi>, <2Pi>, <3Pi> as well as <4Pi> is that they can, next to the default equal temperament tuning, also be tuned in -so called- just intonation. As the intervals in any just intonation system are based on a single reference pitch, we implemented just intonation for all 12 possible base-pitches. To this end we implemented controller 21. With value 0, equal temperament is used. With values 12 to 23 just intonation is in use, based on the references C to B. These are the interval ratios as implemented:
| 1:1 | 16:15 | 9:8 | 6:5 | 5:4 | 4:3 | 45:32 | 3:2 | 8:5 | 5:3 | 9:5 | 15:8 |
Note that changes of tuning are only applied to the next note played and thus do not affect an already playing note.
For composers <4Pi> offers a wealth of subtle possibilities, a striking one being that the pipes can also produce controllable noise bands around their central pitches. Also, each pipe can be individually pitch-shifted a quartertone up or down whilst sounding. Not only it can behave as a regal organ, but also quite well as a source of soft but high pitched percussive sounds. In order to explore this, just set the sustain level very low and use very high velocity values with fast attack and decay.
Midi implementation and mapping:
Midi channel: 5 (counting 0-15)
Note Off: notes 43 to 96 / 108, note release time implemented. If`release
is used, it will override the setting of ctrl.19 (global release time).
Note On: notes 43 to 96 / 108, velo implemented. The velocity byte controls
the attack level, reached by the end of the attack period.
Note: the range 97 to 108 can only be used if the notes, an octave lower, are not used at the same time.
<4Pi> has three 1W LED lights, one on each board. These lights are mapped on midi notes 12, 13 and 14. For these, velocity is not implemented. Note 12 and note 14 are blue, note 13 is yellow. Note 15 can be used to steer the small blue led on the third board. Normaly this LED is used to indicate the being in use of a tuning different from normal 12-tone equal temperament.
Controllers:
#1: Wind noise or pitch instability. (Default value 8)
#7: Global volume (default value 127)
#15: Waveform controller (duty cycle, default value 99).
#16: global sustain level (default value 84)
#17:global attack control (attack time) (default value 10)
#18: global decay time (default value 20)
#19: global release time (default value 10), release starts on reception
of a note-off command. If note-off with release commands are issued, the release
byte sent will override this controller for the note released.
#21: tuning system in use. Value 0 (default) sets equal temperament. Values
12-23 set just intonation based on the notes C to B respectively. The blue LED
on the third PCB will be lit, if a JI tuning is in use.
#66: Power on/off
switch. Power off resets all controllers to their startup default values. Users
should always send #66 with value 0 when the robot is not playing.
#67 to #120: Microtuning controllers for the individual notes. Note 43 uses
ctrl.#67 etc, up to note 96 with ctrl.#120. By default all these controllers
are set to 64. The range is about a quartertone up or down. These controllers
are not implemented for the note range 97 to 108. (This limitation is due to
the 7-bit constraints inherent to the MIDI protocol.) Warning: In many sequencer
programs, controllers 98 and 99 are treated as 'NRPN': non registered parameter
number. Both controllers are then handled together as a 16 bit controller, where
ctrl.99 holds the MSB and 98 the LSB.
#123: all notes off, preserving all controller
settings
Note: controllers #16, #17, #18, #19, #21 will have an effect only for the next following note played and have no effect on the note(s) sounding. Controllers #1, #15, #66, #67 to #120 and #123 have an immediate effect.
ADSR-implementation details:
Program change, with value 0, is implemented and can be used to reset all controllers to their cold boot settings. This command will also reset the tuning in use.
Key pressure is implemented and allows you to modify the duty cycle of the wave used for a note whilst it is playing. When a note-on is received, the wave will allways use the setting set with global controller #15, but after a note-on, it can be modulated freely with the key pressure command. This is fully polyphonic and implemented over the entire range.
Channel aftertouch and global pitch bend are not implemented on <4Pi>
| All specs given here are subject to changes during the still ongoing evaluation
process. The instrument will be available for users by the end of august
2022, if our health permits. Its first public appearance and demonstration
was planned in august 2022 at Logos Foundation. |
|
Design, research, coding and experimental construction: dr.Godfried-Willem
Raes (2022)
Collaborators:
Mattias Parent
Bert Vandekerckhove
Music composed or arranged for <4Pi>:
Godfried-Willem Raes "Pi four Steely", 5'40" (2022)
Godfried-Willem Raes "Slider four Pi", 3'30" (2022)
Ludwig Van Beethoven "Allegro fuer eine Floetenuhr" (4Pi version 2022)
Georg Telemann 'Canonische Sonate #1' (4Pi version 2022)
Adriaen Willaert 'Ricercari a tre voci #1'
Gilles Binchois 'Triste Plaisir' (this file also demonstrates tuning in just intonation based on G)
Giovanni Gabrieli 'Canzone'
Nederlands:
Nadat we een reeks experimentele robots hadden gebouwd waarvoor we door luidsprekers in resonantie gebrachte buizen gebruikten, de reeks <Hybr>, <HybrHi> en <HybrLo>, kwam Laura Maes bij ons terecht voor de ontwikkeling van een klankkunst installatie waarvoor vele honderden volkomen asynchrone pulsjes moesten worden opgewekt. Daardoor kwamen we ertoe in ons labo een reeks experimenten op te zetten naar voor dat doel bruikbare transducers. De voorwaarden waren: geen waarneembare eigen toonhoogte, goedkoop, laag stroomverbruik, lage voedingsspanning, relatief hoge geluidsterkte. Kleine luidsprekertjes, zoals toegepast in <HybrHi>, bleken weliswaar bruikbaar, maar veel te duur voor dit projekt. Zo kwamen we terecht bij allerlei kleine elektromagnetische zoemertjes. De piezoelektrische exemplaren voldeden weliswaar aan de voorwaarden wat betreft prijs, maar de relatief hoge noodzakelijke bedrijfspanning noopte ons ertoe hen te verwerpen. Het hele projekt diende immers gevoed te worden uit kleine zonnepanelen. Die elektromagnetische zoemertjes zijn in feite sterk vereenvoudigde versies van de elektromagnetische hoofdtelefoons uit het begin van de 20e eeuw, waarin een groot stalen membraan werd toegepast. Eenzelfde opbouw hebben ook vele oude types magnetische en laagohmige oortelefoontjes.
Zoals we bij snaren (en longitudinale luchtkolommen) in akoestisch opzicht van buiken en knopen (punten op een in hoofdzaak een-dimensioneel trillend medium) spreken, krijgen we bij membranen te maken met buiklijnen en knooplijnen beschreven in een twee-dimensioneel vlak. Wanneer een ingeklemd en gespannen rond membraan in het midden wordt aangeslagen dan krijgen we een knooplijn die samenvalt met de omtrek van het membraan. Deze trillingsvorm vormt de grondtoon van het trillend membraan. Omdat de door de rand weergekaatste vlakke golf nu niet meer een-dimensioneel is en bij het doorlopen van haar baan een wisselende weerstand ondervindt, liggen de knooplijnen nu niet meer op gelijke afstanden van elkaar. Gevolg: de boventonen zijn niet langer gehele veelvouden van de grondtoon en komen zelfs niet in de buurt daarvan. Voor een langs beide zijden vrij trillend homogeen membraan verhouden de eerste en de tweede boventoon zich tot de grondtoon als 1 : 2,3 en 1 : 3,6. Daarbij moeten we opmerken dat de juiste waarden van die getalverhoudingen mede afhankelijk zijn van de dikte van het membraan evenals van de materiaaleigenschappen ervan (massa en elasticiteits modulus). Het zijn dus in de verste verten geen 'harmonischen' in platonische zin (er is immers niks harmonisch aan). Langs beide zijden vrij trillend wil zeggen dat het membraan dus niet gekoppeld is aan een klankkast (gesloten, zoals bij een pauk, noch open, zoals bij een bongo of een conga). De koppeling van een membraan aan een resonator heeft een determinerende invloed op de trillingswijze van dat membraan. Toen we in ons labo bezig waren met het grondig uitmeten van de akoestische en elektroakoestische eigenschappen van allerlei buzzertjes, ontdekten we dat voor een bepaald type buzzer (de ABT-408 van Multicom), de boventoon met een verhouding 1:3.14, een overmatige duodecime, erg sterk aanwezig was. Ook het andere klassieke irrationale getal e (2.7183...) , konden we trouwens in de verhouding 1:e bij benadering observeren.De naamgeving van de hier behandelde kleine robots - de Pi-reeks- is aan deze ontdekking ontleend. Meteen ook een eerbetoon aan de grote Duitse wiskundige Euler, wiens betrekking e^Pi.i = -1 beslist tot de mooiste uit de hele wiskunde behoort. Graag hadden we membranen ontworpen met een zo getrouw mogelijke boventoonsverhouding 1:e en 1:Pi, maar daarvoor ontbreekt het ons zowel aan het nodige wiskundig apparaat als aan uitrusting om zo'n membraan ook daadwerkelijk te ontwerpen en te vervaardigen. De vier ¶-robots die we bouwden kwamen tot stand tussen 2017 en 2022.
<Pi>
het ontwerp van dit eerste kleine robotje kwam tot stand vanuit de frustratie
die we ondervonden bij het geven van talloze voordrachten en lezingen op grond
van de onmogelijkheid een en ander te kunnen demonstreren. Uiteraard vormde
dat nooit een probleem voor de voorstellingen van het robotorkest die we in
de Logos tetraeder in Gent zelf verzorgden. Daar immers staat het grote orkest
zowat permanent opgesteld. Op verplaatsing echter, was dat frustrerend. Zo ontstond
het idee om een klein en uiterst draagbaar robotje te bouwen waarmee toch heel
wat principes achter de experimentele instrumentenbouw konden worden gedemonstreerd.
Het robotje moest in een klein koffertje als handbagage in een vliegtuig meegenomen
kunnen worden. De vele experimenten die we hadden uitgevoerd voor het 'Spikes'
projekt in opdracht van Laura Maes, leverden ons meteen een ontwerp op voor
een extreem hoog gestemd orgeltje waarbij de pijpjes door de membranen in de
elektromagnetische buzzertjes in resonantie werden gebracht. Het tessituurbereik
voor dit instrument werd  ,
wat meteen ook de absolute bovengrens is van wat in MIDI, met zijn 7-bits protocol
kan worden geimplementeerd.
,
wat meteen ook de absolute bovengrens is van wat in MIDI, met zijn 7-bits protocol
kan worden geimplementeerd.
Het buzzertje dat we grondig onderzochten en uiteindelijk ook toepasten voor
het 'Spikes'-projekt, type ABT-408-RC, kost slechts zowat een Euro per stuk,
wat gezien de vele honderden die we ervan nodig hadden, een niet onbelangrijk
detail is. Het bruikbaar frekwentiebereik van deze onderdeeltjes, hoewel allesbehalve
lineair verlopend, reikt van ca. 920 Hz tot ca. 8000 Hz. Onze nieuwsgierigheid,
als altijd grenzend aan het destruktieve, bracht ons ertoe de komponent open
te maken en helemaal uiteen te halen. 'Reverse engineering' noemt men dat doorgaans.
Ze zijn opgebouwd met een cilindrische permanente neodymium magneet, diameter
2 mm, waarop een spoeltje is gewikkeld. Hiervoor is koperdraad met een diameter
van 0.115 mm (SWG44 of AWG40, volgens de koperdraadtabel) gebruikt. De maximale
toelaatbare gelijkstroom bij een stroomdichtheid van 6 A / mm2 komt dan uit
op 30 mA. De DC weerstand van de wikkeling is 6.5 Ohm.  De induktie van het spoeltje is 903 uH, waardoor de impedantie bij de resonantiefrekwentie
(2.731 Hz) oploopt tot 22 Ohm. Dat verklaart natuurlijk de bedrijfspanning van
3Vpp en de stroom van 70 mA die in het datablad vooropgesteld wordt. Het ferromagnetisch
membraan dat voor de magneet is aangebracht heeft een diameter van 11.2 mm en
is vervaardigd uit staalplaat met een dikte van 0.05 mm. In en op het centrum
van het membraan is een rond verdikkingsplaatje -eveneens 0.05 mm dik- gepuntlast.
Het membraantje kan dan ook niet als homogeen worden beschouwd en dit verklaart
helemaal de geobserveerde inharmonische boventoon met de Pi-verhouding tot de
grondtoon.
De induktie van het spoeltje is 903 uH, waardoor de impedantie bij de resonantiefrekwentie
(2.731 Hz) oploopt tot 22 Ohm. Dat verklaart natuurlijk de bedrijfspanning van
3Vpp en de stroom van 70 mA die in het datablad vooropgesteld wordt. Het ferromagnetisch
membraan dat voor de magneet is aangebracht heeft een diameter van 11.2 mm en
is vervaardigd uit staalplaat met een dikte van 0.05 mm. In en op het centrum
van het membraan is een rond verdikkingsplaatje -eveneens 0.05 mm dik- gepuntlast.
Het membraantje kan dan ook niet als homogeen worden beschouwd en dit verklaart
helemaal de geobserveerde inharmonische boventoon met de Pi-verhouding tot de
grondtoon.  Aan de achterzijde,
naast de twee aansluitpennen, zijn twee kleine drukkompensatiegaatjes aangebracht.
De klank kan uit de gesloten behuizing -wellicht ontworpen als een kleine Helmholtzresonator-
ontsnappen via een rechthoekige opening aan de zijkant. De gestemde resonatorbuisjes
maakten we uit aluminiumpijp 10 mm buitendiameter, 8 mm binnendiameter. Gezien
de rechthoekige klankopening ( 6 x 6.4 mm) moesten we een speciaal werktuigje
bouwen om de buisjes aan een kant via extrusie aan te passen. De klank van de
op deze manier opgebouwde pijpjes vertoont erg veel gelijkenis met die van een
hooggestemd tongwerk, genre regaal, in een traditioneel pijporgel, ook al komen
zo hoog gestemde tongwerken in een pijporgel nooit voor.
Aan de achterzijde,
naast de twee aansluitpennen, zijn twee kleine drukkompensatiegaatjes aangebracht.
De klank kan uit de gesloten behuizing -wellicht ontworpen als een kleine Helmholtzresonator-
ontsnappen via een rechthoekige opening aan de zijkant. De gestemde resonatorbuisjes
maakten we uit aluminiumpijp 10 mm buitendiameter, 8 mm binnendiameter. Gezien
de rechthoekige klankopening ( 6 x 6.4 mm) moesten we een speciaal werktuigje
bouwen om de buisjes aan een kant via extrusie aan te passen. De klank van de
op deze manier opgebouwde pijpjes vertoont erg veel gelijkenis met die van een
hooggestemd tongwerk, genre regaal, in een traditioneel pijporgel, ook al komen
zo hoog gestemde tongwerken in een pijporgel nooit voor.
Bij de bouw van dit instrumentje kwamen we er al gauw achter dat het hoogste oktaaf van de geplande tessituur (de noten 116 tot 127) met de ABT-408 buzzertjes niet goed tot klinken kon worden gebracht. Het geluidsvolume was veel te zwak in het bereik 8000Hz tot 12500Hz en het koppelen aan resonatoren had absoluut geen enkele zin: met of zonder resonator maakte gewoon niets uit, wat mede een gevolg is van het feit dat de diameter van de resonatoren veel te groot is ten opzichte van de lengte ervan. Hierdoor wordt de Q-faktor (de kwaliteitsfaktor van een resonator, waarmee uitgedrukt wordt hoe groot de opslingering van de amplitude bij de resonantiefrekwentie is) van de resonator zodanig klein, dat er gewoon geen resonantie meer kan optreden.
Voor de aansturing van de membraangestuurde pijpjes ontwierpen we een schakelschema en een gedrukte schakeling gebruik makend van Microchip 24EP128MC202 microprocessors. Deze 16-bit processors zijn speciaal ontworpen om te worden ingezet in besturingen voor driefasen motoren. Een dergelijke chip kan gelijktijdig drie verschillende noten/toonhoogtes genereren en daarbij ook nog instaan voor drie autonome sturingen van de omhullende. Da's dus de helft meer dan wat we met de ARM processoren gebruikt in <Hybr> konden bereiken. Alle klanksynthese gebeurt hier in het digitaal domein, gebruik makend van pulsbreedte modulatie. Dit is dus fundamenteel verschillend van de wijze waarop we o.m. de <HybrLo> robot en vele van onze monofone blaasinstrumentenrobots bouwden. Door toepassing van zuiver digitale technologie kon hier heel wat bespaard worden, immers digitale AND-poorten zijn heel wat goedkoper dan kwalitatieve analoge multiplierchips. Drie van de vijf beschikbare timers in elke processor worden gebruikt voor de toonhoogte opwekking. De duty cycle kan daarbij worden gevarieerd waardoor klankkleurmodulatie mogelijk wordt gemaakt. Hiervoor werd MIDI-controller #15 geimplementeerd. Drie PWM kanalen werkend op een draaggolffrekwentie van ca. 300kHz worden gebruikt voor alles wat amplitude en amplitudemodulatie betreft, dus ook voor de omhullende generator. Gezien de erg hoge draaggolffrekwentie, konden we elke vorm van low-pass filtering weglaten. Alle mogelijk ontstane artefakten in de golfvorm moeten immers ver boven het menselijk waarneembare worden gesitueerd. Bovendien zorgt ook de inductiviteit van de spoeltjes (903 H) voor enig 'natuurlijk' low-pass gedrag.
<Pi> is normaal gezien gestemd in de algemeen gangbare gelijkzwevende stemming. Gezien zijn erg uitgebreide tessituur, is <Pi> ideaal geschikt om als pedagogisch hulpmiddel te worden ingezet ter demonstratie van de dissonantie van de kwinten in deze stemming bij extreem hoge noten. Ook voor demonstraties van verschiltonen in de menselijke audioperceptie is het een geschikt hulpmiddel, vooral omdat de pijpjes volstrekt onderling onafhankelijke klankbronnen vormen.
Een extra mogelijkheid die we voorzagen voor alle robots uit de pi-reeks, is dat ze kunnen gebruikt worden in diverse juiste boventoonsstemmingen. Dit kan omdat de Q-faktor van de pijpen als resonator een relatief grote bandbreedte vertoont, een fenomeen dat we bovendien nog wat extra versterkten door de pijpjes in bepaalde oktaven aan de bovenkant onder een scherpe hoek af te zagen. Omdat alle juiste-boventoonsstemmingen gesteund zijn op en uitgaan van een welbepaalde basistoonhoogte , implementeerden we meteen twaalf verschillende boventoonsstemmingen, elk gebaseerd op een andere grondtoon uit de gelijkzwevende stemming. Een speciale MIDI-controller (#21) kan worden gebruikt om de stemming van het hele instrument te wijzigen. De 'juiste' intervalverhoudingen die we voor deze stemmingen implementeerden zijn gesteund op volgende chromatische intervalreeks:
| 1:1 | 16:15 | 9:8 | 6:5 | 5:4 | 4:3 | 45:32 | 3:2 | 8:5 | 5:3 | 9:5 | 15:8 |
Omdat bij een zuiver akoestisch instrument, een toon nooit een absoluut zuiver periodiek signaal is -elke periode blijkt bij nauwkeurige analyse telkens weer verschillend te zijn van haar voorgangers- voorzagen we iets gelijkaardigs in de toonopwekking van deze robots: MIDI-controller #1 laat de gebruikers toe om de aperiodiciteit van de golfvormen te besturen. Naarmate wat grotere waarden worden toegepast, onststaat er meer 'ruis' in het opgewekte geluid.
De uitgebreide bestuurbaarheid van de omhullende maakt dat het instrument ook kan worden gebruikt voor (kleine) perkussieve geluidjes, inklusief extreem korte pulsjes of 'spikes'.
Bij publieke demonstraties met <Pi> werden we regelmatig gekonfronteerd met mensen in het publiek die de hoogste noten van <Pi> helemaal niet konden waarnemen. De blootstelling aan de misdadige geluidsvolumes gebruikelijk bij rock koncerten en festivals zullen daar allicht wel voor iets in tussen zitten...
<2Pi>
<Pi> was zowat onmiddellijk na zijn afwerking een vrij groot sukses,
bij zover zelfs dat hij voor enkele maanden met een aantal grotere orgelrobots
(waaronder zelfs <Bourdonola>...) op reis ging naar Manchester waar hij
deel uitmaakte van het orkest in een produktie van Rainer Goebels. Dit werd
als een gemis aangevoeld door de komponisten die toen bij Logos met het orkest
aan de slag waren. Alsof ze een gloednieuw snoepje moesten ontberen... Dit bracht
ons ertoe het experiment van <Pi> verder te zetten en een tweede gelijksoortig
orgeltje te bouwen, nog wat kleiner en bovendien een oktaaf lager gestemd:  Naar
tessituur komt dat overeen met die van een gewone sopraanblokfluit. Ook hier
werden de pijpjes op de buzzers gekleefd en rechtstreeks op de beide printplaten
gemonteerd. Elke printplaat stuurt 15 noten en herbergt telkens vijf microprocessors.
Naar
tessituur komt dat overeen met die van een gewone sopraanblokfluit. Ook hier
werden de pijpjes op de buzzers gekleefd en rechtstreeks op de beide printplaten
gemonteerd. Elke printplaat stuurt 15 noten en herbergt telkens vijf microprocessors.
De klank is zacht en bevat veel niet-harmonische boventonen waardoor hij in de richting gaat van een regaal.
<3Pi>
Een hele tijd na de afwerking van <2Pi> hadden we in ons labo wat experimenten
opgezet met conische pijpen. Die bleken immers voor eenzelfde elektrische uitsturing
een heel wat groter geluidsvolume op te brengen. Daardoor werd de mogelijkheid
ontgonnen om een membraan gestuurd orgeltje te bouwen, nog een oktaaf lager
gestemd dan <2Pi>. De tessituur van <3Pi> werd dan ook:  Ook
hier gebruikten we twee printplaten die telkens 15 noten aansturen. Maar, doordat
we hier conische pijpen gebruikten, was evenwijdige montage op de printplaat
onmogelijk. Vandaar de ongebruikelijke plaatsing van de pijpen in dubbele waaiervorm.
Die waaiervorm noopte ons overigens, mede omwille van de massa van de pijpen,
tot het ingieten van de onderkanten van de pijpen in tweekomponenten siliconenrubber.
Dit product is voor het mengen en afbinden goed vloeibaar, waardoor de hechting
omheen de pijpen en op de printplaat gegarandeerd is. De pijpen werden op de
traditionele wijze gesoldeerd en vervaardigd uit een tin-lood legering zoals
gebruikelijk in de orgelbouw.
Ook
hier gebruikten we twee printplaten die telkens 15 noten aansturen. Maar, doordat
we hier conische pijpen gebruikten, was evenwijdige montage op de printplaat
onmogelijk. Vandaar de ongebruikelijke plaatsing van de pijpen in dubbele waaiervorm.
Die waaiervorm noopte ons overigens, mede omwille van de massa van de pijpen,
tot het ingieten van de onderkanten van de pijpen in tweekomponenten siliconenrubber.
Dit product is voor het mengen en afbinden goed vloeibaar, waardoor de hechting
omheen de pijpen en op de printplaat gegarandeerd is. De pijpen werden op de
traditionele wijze gesoldeerd en vervaardigd uit een tin-lood legering zoals
gebruikelijk in de orgelbouw.
Voor de laagste reeks van 15 noten, dimensioneerden we de pijpen als kwart-golflengte resonatoren, terwijl we voor de tweede reeks van 15 noten, aan de achterzijde van het instrumentje, half-golflengte resonatoren toepasten. Dit vooral om een optimale verhouding diameter versus pijplengte te kunnen aanhouden. Dat komt de gedefinieerdheid van de resonantiefrekwentie ten goede.
<3Pi> laat zich goed vergelijken met een historisch bijbelregaal, al heeft het heel wat meer mogelijkheden in zich, niet in het minst door de vele stemmingsmogelijkheden, toonhoogtemodulatie en de bestuurbare dynamiek.
<4Pi>

De soldeerbout was nauwelijks goed afgekoeld na de bouw van <3Pi>, of
we raakten gebeten door de mogelijkheden geboden door conische resonatoren in
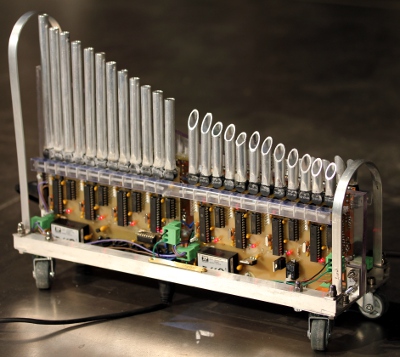
nog heel wat lagere registers. Zo ontstond de <4Pi> robot, een heus 5
1/2 oktaafs regaalregister met membraangestuurde pijpen. Dit is de tessituur:
Voor deze robot, niet ontworpen om een miniatuurtje te zijn, spanden we ons in om een maximale resonantie te verkrijgen in de konische pijpen, zonder al teveel toegevingen op de lengte dus. De pijpen zijn weliswaar gestemd en berekend voor welbepaalde centrale toonhoogtes, maar extreem strikt is dit niet omdat de uiteindelijke stemming vooral wordt bepaald door de trilling van de membranen. De pijpresonatoren zijn evenwel allesbepalend voor de verkregen klankkleur van het register. Zoals in traditionele orgelbouw, kunnen de resonatoren voor tongwerken gebouwd worden als volle-lengte, halve-lengte of kwart-lengte resonators. Trompetregisters met volle-lengte resonators kunnen heel erg krachtig en grondtonig klinken en naarmate de pijpen korter worden gedimensioneerd, wordt ook hun klankkleur scherper en doordringender.
Net zoals voor <3Pi> wilden we ook hier pijpen bouwen met een heel scherpe openingshoek. Daartoe bouwden we een kleine reeks pijpen met verschillende lengtes en een gelijke openingshoek. Op grond van opmetingen van hun akoestisch gedrag, konden we zodoende formules opstellen voor de berekening van het gehele register.
De langere pijpen maakten we uit dun messing. Hierdoor kon het gewicht van het instrument laag worden gehouden. Bovendien is messing voor lange pijpen een heel wat stabieler materiaal dan het klassieke tin-lood mengsel gebruikt in traditionele orgelbouw. Alleen laat het zich niet zo makkelijk in konische vorm solderen. Om dit werk goed en zonder lelijke soldeernaden uit te voeren is eigenlijk een mal nodig waarop het soldeerwerk kan worden uitgevoerd. Het maken van zo'n mal -onze eigen draaibank is daarvoor te klein- was te duur voor onze door totaal gebrek aan subsidie erg beperkt geworden mogelijkheden. Enkele pijpen maakten we ook uit een tin-antimoon legering, nog wat restmateriaal overgebleven na de bouw van ons groot kwarttoonsorgel <Qt>. Ziehier het resultaat van onze metingen. De waarde voor c in de formule kwam uit op ca. een derde van de akoestische lengte c. De pijpen gedragen zich klaarblijkelijk als afgeknotte konussen waarbij de konus gekoppeld is aan een cilinder met eenzelfde volume als de virtuele konuslengte c. Vandaar onze afleiding Lak = L + 0.3d + c/3. Hier een tekening gesteund op onze berekeningen:
De experimenten met deze konische pijpen overtuigden ons van de mogelijkheid
een instrument te bouwen dat meer dan een oktaaf lager zou reiken dan <3Pi>
zonder daarbij veel in klankvolume in te boeten. In tegenstelling tot wat we
vinden in heel wat tekstboeken rond akoestiek, gedragen deze pijpen zich als
kwart-golflengte resonators.
Omdat de resonatoren voor de hoogste noten te kort waren bij gebruik van kwart- of halve golflengtes na aftrek van de eindkorrekties, bouwden we die voor het hoogste oktaaf als volle golflengte resonator, terwijl we voor het middenbereik halve-golf maatvoering toepasten. Aangezien de laagste pijpen kwart-golf als basis hebben, ontstonden in de hele reeks pijpen waaruit het register is opgebouwd, twee grote sprongen. Hierdoor kwamen we ertoe de pijpen op te stellen in een wel heel erg traditionele vorm, met een symmetrie rond een centrum waarin de grootste pijp geplaatst is.
Voor het vastzetten van de pijpen gebruikten we vloeibare bijenwas, een techniek die we overnamen uit de accordeonbouw, waar die wordt gebruikt voor het vastzetten van de doorslaande tongen. Een bron van permanente diskussie onder instrumentenbouwers en musici heeft betrekking op de invloed van het materiaal waaruit een orgelpijp (of een blaasinstrument wat dit betreft) vervaardigd is op de klank. Al onze eigen experimenten en metingen wat dit betreft wijzen uit dat de aard van dat materiaal geen enkele rol speelt, tenminste voor zover dat wel voldoende dik en stevig is enerzijds, en anderzijds voorzover de gladheid van het oppervlak gelijk blijft. De diverse materialen waaruit de pijpen van <4Pi> zijn opgebouwd laten dan ook geen enkel akoestisch verschil horen. Die diversiteit komt het uitzicht van het instrument allicht niet ten goede, maar we wilden de proefneming toegankelijk en onze stelling verifieerbaar houden in het definitieve instrument.
Voor de elektronische besturing van <4Pi> ontwierpen we drie gedrukte schakelingen, elk goed voor 18 noten. Zes microprocessoren per print. De schakeling is niet helemaal gelijk aan die voor <3Pi> vooral omwille van het feit dat de voor <3Pi> gebruikte AND-poorten niet langer worden geproduceerd. Het hier gebruikte type heeft een andere behuizing en penkonfiguratie waardoor het printontwerp wel helemaal hertekend diende te worden.
Dit is de schakeling, waarbij we slechts een enkele processor -goed voor drie
noten dus- tekenden: De
toepassing van een relais kan wellicht wat eigenaardig overkomen, maar is een
gevolg van het feit dat gedurende het opstarten van de microprocessors, de uitgangen
ongekontroleerd en dus ook hoog kunnen zijn. Daardoor zou DC door alle buzzers
lopen, een stroom van (berekend) 13 A, wat de mogelijkheden van de voedingsmodules
(2 A) ruim te boven gaat en dus aanleiding geeft -zoals ook bleek bij onze eerste
proeven met <Pi>- tot hikken. Nu wordt het relais pas bekrachtigd bij
ontvangst van een power-on kommando via MIDI.
De twaalf pijpjes voor de noten 84 tot 96 hebben een dubbel gebruik: ze worden zowel voor die tonen als voor die een oktaaf hoger (97 tot 108) gebruikt, waarbij de gelijknamige noten elkaar wel uitsluiten. Uiteraard levert dit een besparing op. Nieuw is deze techniek niet, want ook in de historische instrumentenbouw van klavichorden was dit erg gebruikelijk: het gebonden klavichord, waarbij eenzelfde snaar ook voor verschillende noten kon worden gebruikt. We pasten die techniek overigens ook al eerder toe in de bouw van de <HybrLo> robot, die slechts 12 pijpen telt.
Een bijzonderheid van de <4Pi> robot is dat elke noot middels een controller in toonhoogte kan gemoduleerd worden binnen een bereik van een halve toon (kwartoon omhoog en omlaag). Ook modulatie van de klankkleur behoort tot de mogelijkheden.
De bronkode voor de processors is ruimschoots voorzien van kommentaar en kan vrij gedownload worden van de Logos website. Elke robot heeft immers een eigen webpagina waarop links naar de bronkode zijn voorzien. Voor het programmeren van de chips, is een PicKit4 programmer nodig evenals een (gratis) installatie van MPLAB (Microchip). De bronkode is geschreven in Basic, gebruik makend van de uitstekende Positron compiler voor PIC processors.
| Back to Logos-Projects page : projects.html | Back to Main Logos page:index.html | To Godfried-Willem Raes personal homepage... | To Instrument catalogue |  |
Dit experimenteel instrument kwam tot stand zonder enige steun van de Vlaamse Gemeenschap, na een eerste vernietigend en korrupt advies in 2016 van Piet Van Bockstal. In 2022 dienden we een nieuw subsidiedossier in, dat opnieuw en op een ronduit beledigende wijze, werd afgewezen door de ministeriele advieskommissie klassieke muziek waarin Francis Maes, Frederic Styns en Vincent Goris zetelden en ons rabiaat veroordeelden...
Bouwdagboek - Construction diary:
25.03.2022: Eerste voorstudie van de firmware voor <4Pi>.
26.03.2022: Start opmetingen en konstruktie van experimentele konische resonators.
Konusmal, in op de draaibank afgedraaid staal: :
27.03.2022: Math research: acoustical modelling of resonator pipes. Calculation
and modeling program written in PBcc.
28.03.2022: Twelve resonator pipes finished and measured. Not yet tuned.
29.03.2022: Three pipes added...
30.03.2022: Further attempts to make brass pipes
31.03.2022: Brass plate, 0.2mm thick seems to work reasonably well.
01.04.2022: Nine brass pipes measured, tuned and finished. Six pipes made in
Sn/Sb alloy. Five pipes in Sn/Pb allow. Decided to make it at least a 3 1/2
octave instrument.
02-03.04.2022: PCB redesigned. Now we can use standard CD74HC08 AND gates instead
of the somewhat esoteric 74AC11008N parts we used in earlier Pi-designs. The
74AC11008N chips are no longer produced and also no longer available on the
market. There are no pin-to-pin compatible replacements. Note that these CD74HC08
gates are quad-AND gates and come in 14-pin DIL packages. Here is the new PCB
at 200%: 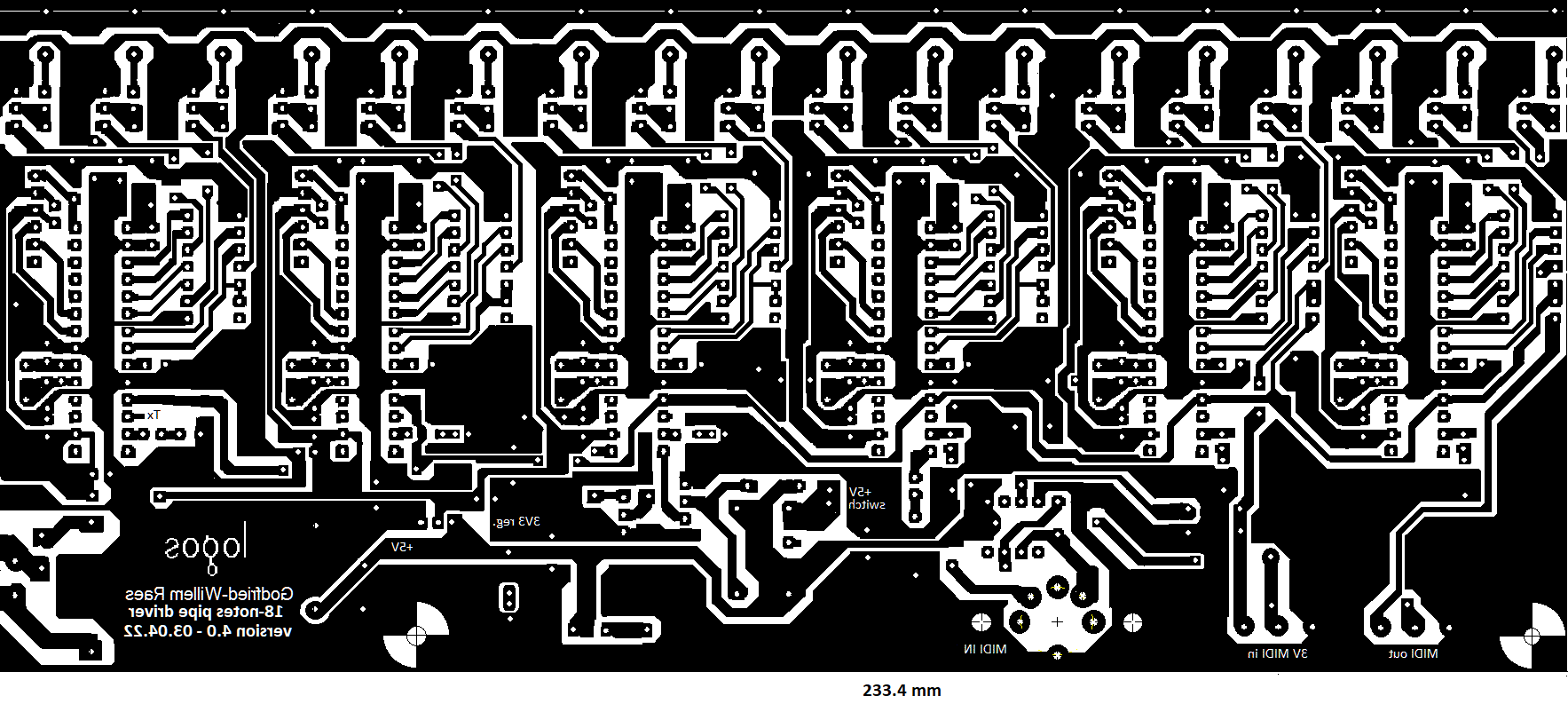 The
resolution is 96 dpi. We may stil change a few details, one of them to improve
the implementation of a general volume controller (#7), operating independently
from the ADSR controllers. Also we may consider to extend the range with 1 tone
in the low (so starting at Bb, or midi note 46), however, we first have to experiment
with such pipes and evaluate the loudness.
The
resolution is 96 dpi. We may stil change a few details, one of them to improve
the implementation of a general volume controller (#7), operating independently
from the ADSR controllers. Also we may consider to extend the range with 1 tone
in the low (so starting at Bb, or midi note 46), however, we first have to experiment
with such pipes and evaluate the loudness.
04.04.2022: Complete (destructive) disassembly of a buzzer for analysis purposes:
The winding is ca. 2 m in length, the DC resistance measuring 6.5 Ohm, gives
us 325 Ohms per 100 meter. Consulting our copper-wire
table, we find that this corresponds to a 0.115 mm diameter enameled wire,
SWG44 or AWG40. At a current density of 3 A / mm2 this gives us an allowable
current of 15 mA, at 6 A / mm2 the current can safely become 30 mA. The 70mA
maximum current value given in the data sheet thus seems to be pretty optimistic
and certainly only holds at a frequency of ca. 2.7kHz, where the transducer
impedance is 22 Ohms. In any case, we should not go beyond this value, unless
we limit the duty cycle.
05.04.2022: Down, impossible to work. Studying and trying to digest the negative
advice for our survival subsidy as a foundation... Serious doubts rise with
regard to the scientific integrity of musicologists Frederik Styns and Francis
Maes.
06.04.2022: The Omron relays used for <2Pi> and <3Pi> (G6E-134-ST-US)
can no longer be ordered from Farnell in quantities smaller than 500... So,
we have to change the PCB design again. AND gates, type SN74AC08N, ordered from
Farnell. Two versions of the PCB board made now: one, using a pair of old stock
OUD 5V DC relays, and one using the much larger 30A Omron relay, G4A1AE DC5,
the same type we have been using on the midi-hub boards of all wind-instruments
made by us since 2021. For the AND-gates used here, an alternative would be
CD4081. However, the pinning is a bit different and thus would require yet another
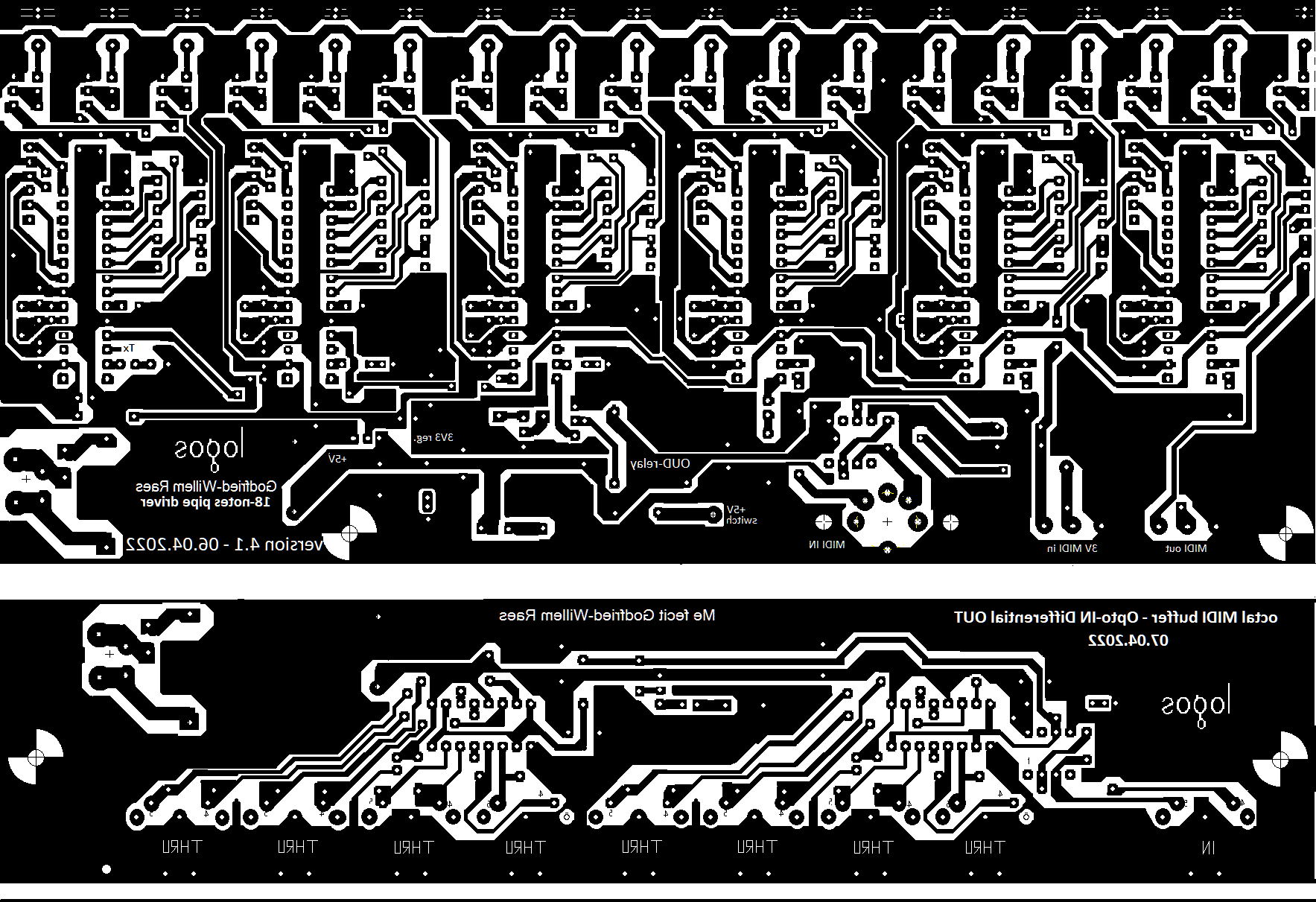
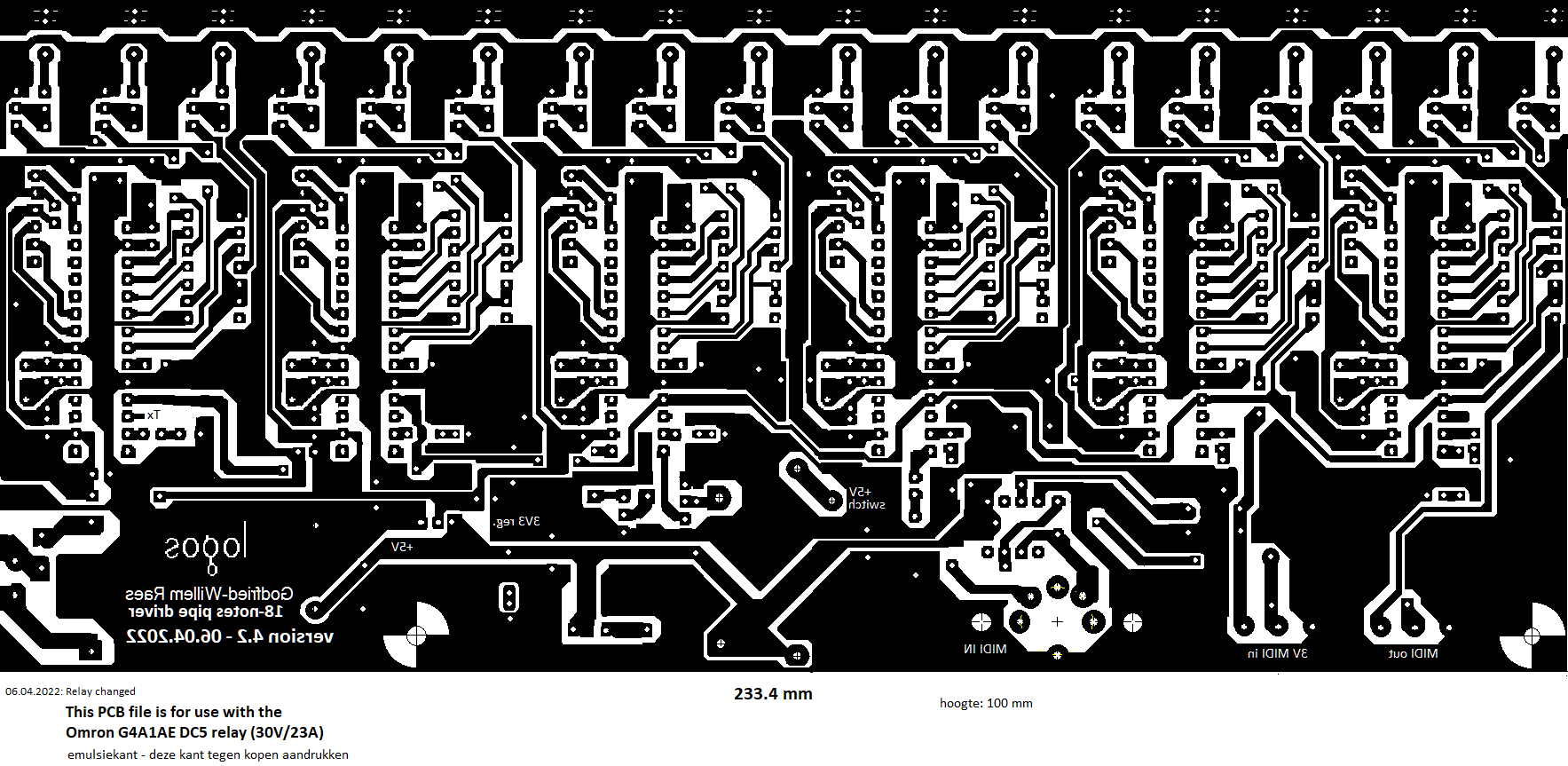
design for the PCB. Here are the PCB files for both versions: OUD-relay
version, Omron 30A relay version.
07.04.2022: Het PCB materiaal Farnell bestelnummer 320-4935 blijkt niet meer
te worden gefabriceerd... Alternatieve PCB's besteld. Nieuwe 8-voudige MIDI
buffer PCB ontworpen. Testpijp in messing voor noot 46 (Bb) afgewerkt.
08.04.2022: Nog twee testpijpen gemaakt uit dun messing shim (0.1 mm). Het lukt,
maar die pijpen zijn wel bijzonder kwetsbaar.
09.04.2022: Twee verlengstukken gemaakt om pijpen te testen voor de noten 41
tot 44. Of we die gaan gebruiken hangt af van de resultaten van de metingen...
10.04.2022: Verlengstukken gemaakt voor pijpen 46, 45, 44. Extra pijp gemaakt
voor noot 43. Te testen en uit te meten...
11.04.2022: En, we gaan door met de bouw van pijpen uit messing, ook al beschikken
we nu niet meer over de middelen om dit echt professioneel aan te pakken...
De lelijke soldeernaden op de achterzijde van de pijpen zullen we dan ook lijdzaam
moeten verdragen. Echte mallen (laten) maken kunnen we ons nu niet meer veroorloven.
12.04.2022: Pijp voor noot 43 afgewerkt en uitgemeten. Voorlopige pijphouder
gebouwd uit hout, met boorgaten 16mm. Kleiner is niet mogelijk want dan raken
de buzzertjes er niet doorheen.
13.04.2022: Nog enkele pijpjes in Sn/Sb/Cu legering gebouwd, maar de voorraad
materiaal van deze legering raakt stilaan volledig uitgeput.
14.04.2022: Nog zeven pijpjes te gaan...
15.04.2022: Alle pijpen gebouwd. Deels met assistentie van Bert Vandekerckhove,
vanwege een vrij ernstige spierverrekking in mijn rechterarm...
16.04.2022: Uittekenen mogelijke windlade/pijphouder. Uiteindelijk blijkt een
volkomen traditionele symmetrische opstelling, nog het beste te werken... Vooral
ook, omdat het ons toelaat de door de diverse gebruikte mensuren (kwart-lamba,
half lambda en lambda) weg te werken.
17.04.2022: Boren van de gaten in de pijphouder plank: 100 x 900, gemaakt uit
hout gerecycleerd van een oud harmonium.
18.04.2022: Verder werk aan de pijphouder: bodemsteun gemaakt uit polykarbonaat
voor de noten 85 tot 96. De pijpjes rusten op met een 16mm bolfrees in de kunststof
uitgefreesde kommetjes. Diepteregeling mogelijk middels de 110 mm lange M5 schroefdraadstangen.
Voor de noten 73 tot 84 passen we hetzelfde recept toe. Pijp 66 is te fragiel
en gaan we opnieuw moeten bouwen...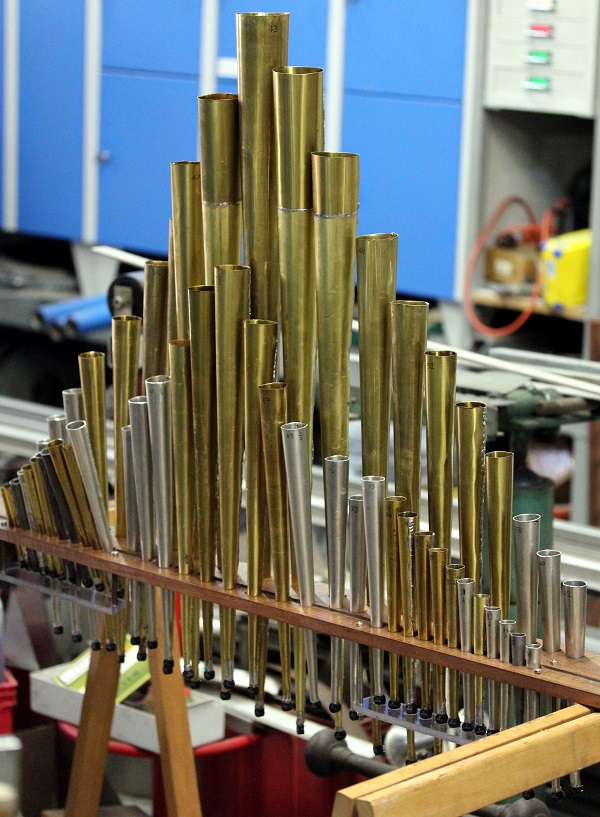 Hier is een detail van de plaatsing van de pijpen voor het topoktaaf:
Hier is een detail van de plaatsing van de pijpen voor het topoktaaf: 
19.04.2022: Verder werk aan de pijphouder: inox boogjes toegevoegd (hartafstand
voor de M4x25 boutjes: 95 mm), ter versterking van de boogvormige plaatsing
van de voorste pijpen. Dit orgeltje wordt ook een mooi wetenschapsdemonstratietoestel
voor het (onbestaand...) klankverschil in funktie van het pijpmateriaal. De
beslissing om juist niet alle pijpen uit messing te maken, is daardoor ingegeven.
20.04.2022: Uittekenen van het chassisplan. Lassen van de vertikale opstanden
met opleg voor de pijphouder. Voor deze robot voorzien we geen wielen, aangezien
hij ontworpen wordt voor wandophanging of montage. De basisplaat is in hout
gemaakt. 
21.04.2022: Verder werk aan het hoofdchassis. Uitzoeken perfoplaat voor de achterwand.
22.04.2022: Konstruktie van de polykarbonaat steunplaat voor de pijpen midden-vooraan.
23.04.2022: Konstruktie polykarbonaat steunplaat (900 x50 x 8) voor de achterste
rij pijpen. Konstruktie van de achterwand voor de bevestiging van de PCB's.
De steunplaat wordt eveneens hierop vastgemaakt met messing bolkopschroeven.
24.04.2022: Korrigeren van enkele boorgaten in de pijphouder. Presentatie van
mogelijke achterwanden en perfoplaat. Montage geanodiseerde alu afstandhouders
tussen de achterste rij pijpen. Vastzetten met M4x10 boutjes.
25.04.2022: Verder uit- en afwerken van de PCB's. Nu ontworpen in Paint als
BMP files in 192dpi resolutie op 100%. Hier zijn de jpg versies: 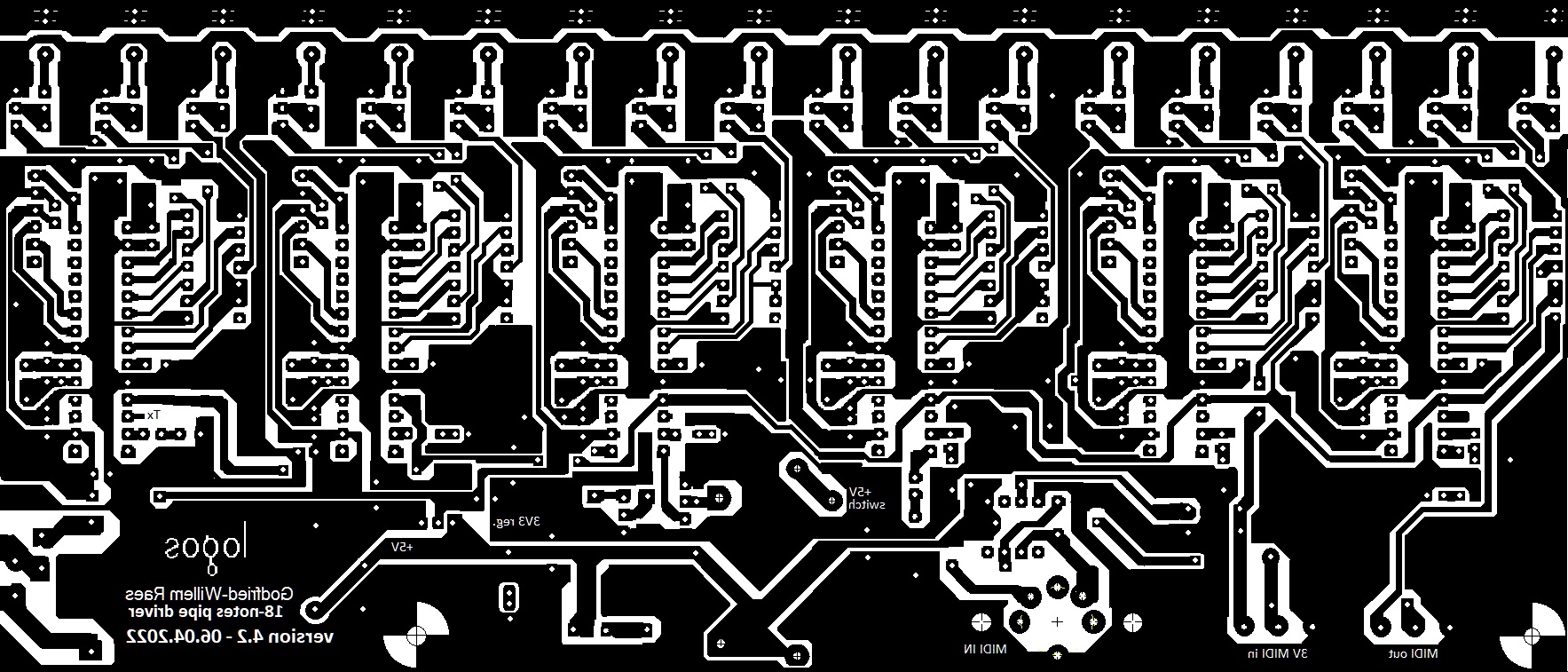
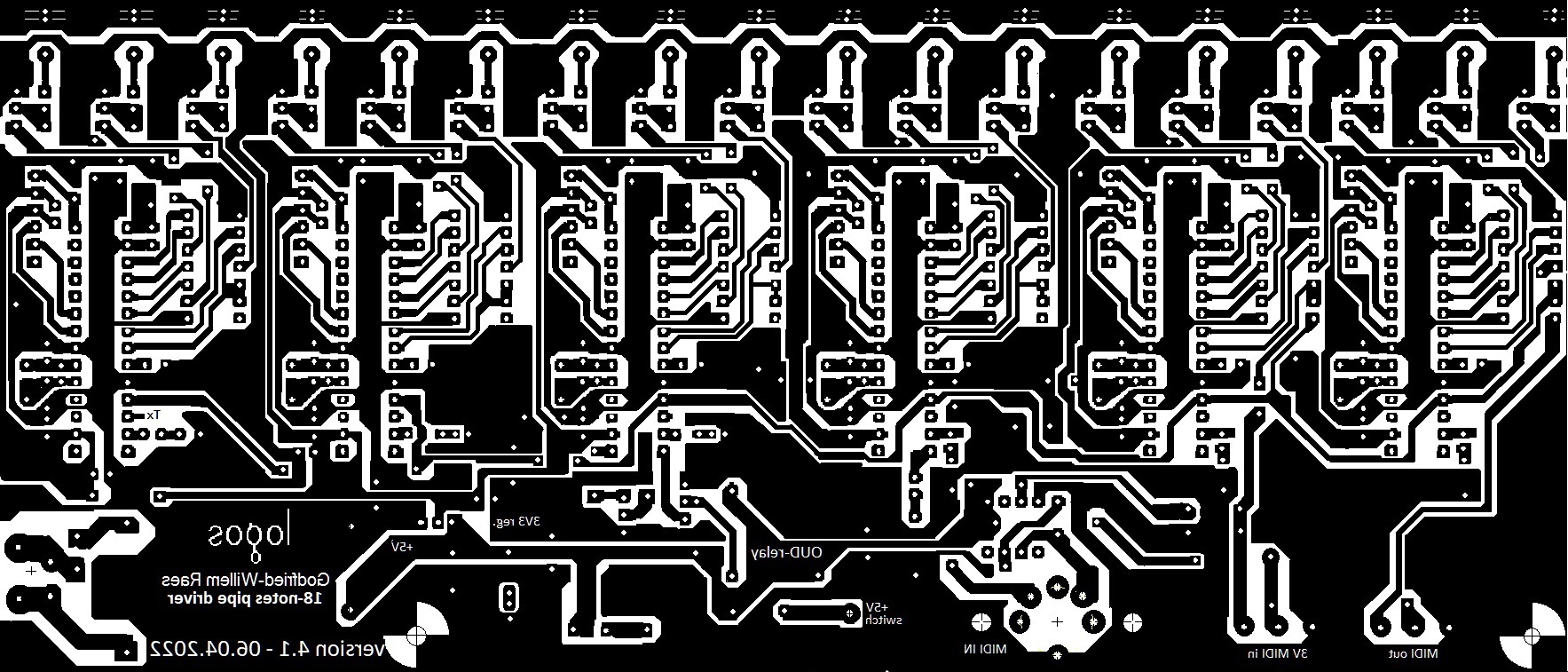 Deze
PCB's verschillen hoofdzakelijk in de voetafdruk van de toegepaste relais.
Deze
PCB's verschillen hoofdzakelijk in de voetafdruk van de toegepaste relais.
26.04.2022: Uitwerking van een bedradingsplan. PCB-ontwerpen in BMP formaat
naar Polo voor aanmaak films.
27.04.2022: Start bedrading. 
28.04.2022: Start redaktie van de firmware kode voor 4Pi. Hierbij willen we
ook een real time volume controller (#7) implementeren.
29.04.2022: Vastzetten van de pijpen met vloeibare was, zoals gebruikelijk in
de akkordeonbouw. Key-pressure geimplementeerd in de firmware. Bedrading van
alle buzzertjes afgewerkt.
30.04.2022: Aansluiten van de Weidmueller konnektors: 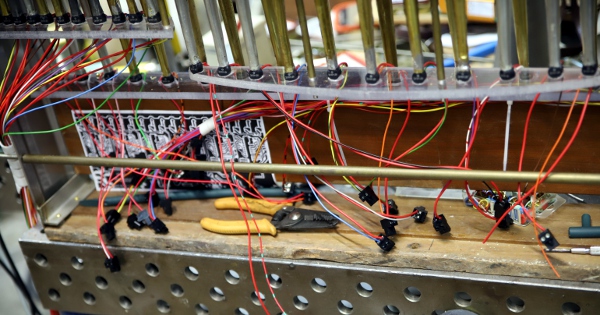 Onze voorraad raakt echter uitgeput. Nieuwe lading besteld bij Farnell. Nog
steeds wachten we op de films voor de PCB's...
Onze voorraad raakt echter uitgeput. Nieuwe lading besteld bij Farnell. Nog
steeds wachten we op de films voor de PCB's...
01.05.2022: Extra lange werkdag ter gelegenheid van het feest van de arbeid.
Toch maar wieltjes monteren? Die van een oud skateboard -nog een gift van Lara
Van Wijnsberghe- zouden hier niet misstaan...
02.05.2022: Interview en atelierbezoek door Willem Elias, Jean-Pierre Vanhee
en Gerbrich Reynaerts. Er komt een artikel in 'De Geus'. Nog wat pijpen vastgezet
met vloeibare bijenwas. De PCB films zijn klaar en afgeleverd. Etsen en boren
zal voor woensdag zijn...
04.04.2022: Etsen en boren van de drie grote PCB's. Het boren van een enkele
print duurt ca. 2 uur...
05.04.2022: Begin soldeerwerk print 1. Inventariseren van de komponenten die
we niet op voorraad hebben: Bourns multiturn trimmers, 10, 20 en 50 Ohm, bij
voorkeur serie 3296W hoewel 3299W -duurder- ook op de print past ; Molex 6-polige
programmeerheaders ; 47uH spoeltjes...
06.05.2022: Verder soldeerwerk voor PCB2, boorwerk voor PCB3 afgewerkt. De printplaat
voor PCB 2 vergt wat korrekties omdat het printmateriaal dat we gebruikten eigenlijk
al lang over datum was (meer dan tien jaar...) waardoor de fotogevoelige laag
aan de randen van de print was aangetast.
07.05.2022: Alle nodige onderdelen uit voorraad gesoldeerd... wachten op levering
van de ontbrekende komponenten. Een enkele blauwe LED op board 3, PIC6 zouden
we kunnen gebruiken als indikatie naar de gebruikers toe, dat <4Pi> is
ingesteld op een andere dan de standaard gelijkzwevende stemming.
08.05.2022: Eerste testmontage van de nog onafgewerkte PCB's op het instrument
zelf. Afslijpen en op maat brengen van de tweepolige Weidmueller konnektors.
09.05.2022: De ontbrekende Bourns trimpots en de 47uH spoeltjes werden geleverd
en kunnen ingesoldeerd worden. Alle PCB's zijn nu volledig bestukt. De elektrische
tests kunnen beginnen. Niet te vergeten: de verbinding tussen de relais uitgang
en de 5V voedingsrail van de buzzers: 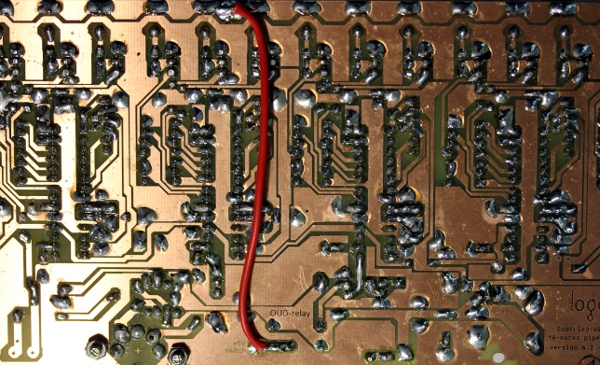
10.05.2022: Boards 1 en twee getest en ok bevonden. Alle PIC's op boards 1 en
2 geprogrammeerd. Montage op de houten achterplank van het instrument met lange
M3 boutjes en 10mm afstandsbussen. Ontwerp van een net-aansluiting: we besluiten
een figure-8 konnektor te gebruiken, vertikaal gemonteerd met twee M3 bouten
op de houten onderplank. Firmware voor de laatste PIC op het derde PCB aangepast
aan de nieuw toegewezen funktie van de kleine blauwe LED.
11.05.2022: Eerste tests: board 2 blijkt een kortsluiting te hebben in de midi-in
sporen. Board 1 en 3 blijken normaal te werken. Na nazicht van de print, nu
ook board 2 aan de praat. Noot 63 doet het niet, de rode LED evenmin. Noot 63
bleek ook te wijten aan een koperrestantje tussen printsporen. Rode LED verder
uit te zoeken. All notes off blijkt niet te werken voor de blauwe LED op het
eerste board... Eerste publieke demo met vluchtig aangepaste midi files van
Morley en Couperin. Een betere log scaling voor ctrl7 is erg wenselijk: zoals
de kode nu is , is het bruikbaar bereik zo van 100 tot 127...
12.05.2022: Afregeling van de trimpots voor een optimale gelijkheid in geluidsterkte
van alle pijpen. Noot: linksom draaien is luider, rechtsom is stiller! De trimpots
zijn 25-turns types. Enkele verdere demo bestandjes met geschikte muziek klaargemaakt:
Adriaen Willaert, Georg Telemann, Giovanni Gabrieli, Gilles Binchois.
13.05.2022: Test kode voor key-pressure en de diverse stemmingen toegevoegd
in GMT. Triste plaisir van Gilles Binchois speelt nu als demo in just intonation
op Sol.
14.05.2022: De (verkeerd gepoolde...) rode 1Watt smd LED op het tweede bord
vervangen door een dubbel geel exemplaar, gesloopt uit een op straat gevonden
gevandaliseerde straatsignalisatie lantaarn. De brandspanning Vf is 2.5V en
de stroom kunnen we beperken tot 150mA met de bestaande 12 Ohm serieweerstand.
Wat verdere metingen uitgevoerd: over de buzzers blijken spanningspiekjes te
staan met een maximale amplitude van 80 Volt. Wanneer we die spikes wegwerken
met een kondensatortje over de buzzer (100nF blijkt goed te werken) wordt de
geluidsterkte heel wat groter. Hetzelfde effect krijgen we trouwens met een
kleine VDR. De spikes maken het beoordelen van de omhullende en de golfvorm
op de oscilloskoop erg moeilijk. Bovendien -om de spanning over de buzzer rechtstreeks
te kunnen bekijken, hebben we een zwevende ingang nodig op de skoop... De buzzers
liggen immers met een pool aan de positieve voedingsspanning.
15.05.2022: Enkele oscilloskoop afbeeldingen gemeten tussen massa en de uitgang
van de MOSFET; 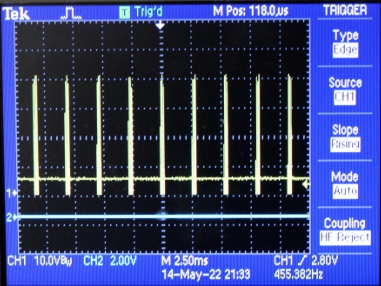 In dit plaatje
zien we duidelijk de 40V grote spikes aan de PWM frekwentie. Merk op dat die
ook 6V negatief gaan! De frekwentie van de hier gegenereerde toon in 455 Hz.
In het volgende plaatje kunnen we de werking van de omhullende generator ontwaren:
In dit plaatje
zien we duidelijk de 40V grote spikes aan de PWM frekwentie. Merk op dat die
ook 6V negatief gaan! De frekwentie van de hier gegenereerde toon in 455 Hz.
In het volgende plaatje kunnen we de werking van de omhullende generator ontwaren:
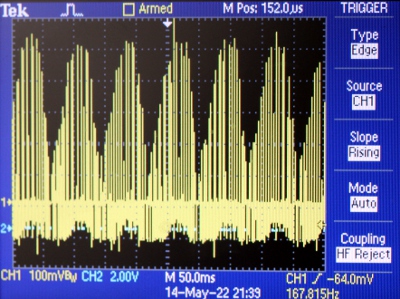 , of, nog iets verder ingezoomd:
, of, nog iets verder ingezoomd:

17.05.2022: Enkele exemplaren van het ABT414 zoemertype besteld en hier afgeleverd.
De (gemeten) induktie van deze zoemers is 3.8mH, de gelijkstroomweerstand 45
Ohm. Bij uitsturing op de resonantiefrekwentie van 2.4 kHz met 6Vpp, blokgolf
en 50% duty cycle, is het opgenomen vermogen 150 mW. De stroom is dan 50mA.
Bij de maximaal toelaatbare spanning van 8 Vpp, wordt de stroom 88 mA en dissiperen
we 355 mW. Zouden we deze transducers voor een nieuw Pi-achtig ontwerp willen
gebruiken, dan moeten we eerst en vooral een konische adaptor draaien op de
draaibank. De klankopening van de transducers is slechts 2.5 mm. De buitenmaat
is 12 mm. Er is geen drukkompensatiegaatje aan de achterkant.
02.06.2022: firmware for the 4 highest PIC's with the code implementing notes
97-108 reflashed
02.08.2022: demo composition finished for <4Pi>: Pi four4 Steely. To be
premiered august 18th.
03.08.2022: Firmware version 1.1 worked out. Individual note pitch shift now
implemented and tested. (controllers 67 to 120). The range is a quartertone
up or down. The duty cycle controller now also works in real time on sounding
notes. All firmware reflashed and tested.
04.08.2022: Further testing and debugging. It would be an option to use keypressure
for pitch modulation instead of all controllers used now. We could then use
the controllers for duty cycle control. Any advice or ideas by users?
05.08.2022: Firmware versie 1.2: nu met zuiver logaritmische scaling voor de
dynamiek. De firmware verbeteringen gevonden voor 4Pi, brachten we nu ook over
naar de firmware voor 3Pi. De manual van dat robotje werd ook aangepast. Verder
werk aan de demostukjes voor <4Pi>.
08.09.2023: Konstruktie van een degelijke flightcase voor <4Pi> met het
oog op het transport ervan naar Berlijn voor de Zeroth Law produktie in de Deutsche
Oper.
14.09.2023: <4Pi> on the road to the Deutsche Oper Berlin.
26-27-28.09.2023: Performances at the Tischlerei in the Deutsche Oper Berlin.
02.10.2023: <4Pi> returned safely and in good shape to its home base in
Ghent.
TO DO:
- evaluation and conclusions on the experimental prototype <4Pi>
- mount a backside, to hide the dirty soldering work on the pipes
- soldering small VDR's or capacitors in parallel with the buzzers. An adapted PCB to accomodate these is already available.
- improving the quality of the conical pipes: the soldering is really uggly, but we need a shaping tool (expensive...) to do a better job.
- suggested changes for further future designs:
Maintenance information:
Microcontroller firmware:
source code (to be separately compiled for each of the 18 microprocessors).
Hex-dumps for the 18 <4Pi> PIC's:
| PIC 1 43-45 | board1 |
| PIC 2 46-48 | board1 |
| PIC 3 49-51 | board1 |
| PIC 4 52-54 | board1 |
| PIC 5 55-57 | board1 |
| PIC6 58-60 | board1 |
| PIC 7 61-63 | board 2 |
| PIC 8 64-66 | board 2 |
| PIC 9 67-69 | board 2 |
| PIC 10 70-72 | board 2 |
| PIC 11 73-75 | board 2 |
| PIC 12 76-78 | board 2 |
| PIC 13 79-81 | board 3 |
| PIC 14 82-84 | board 3 |
| PIC 15 85-87 | board 3 |
| PIC 16 88-90 | board 3 |
| PIC 17 91-93 | board 3 |
| PIC 18 94-96 | board 3 |
The PCB's for this instrument are here:
PCB 1 and 2:
PCB 3:
If people are interested in owning a handmade version of this organ robot, I can hand make them for ca. 10000 Euro. Delivery time will be ca. 4 months.
Cost calculation for the <4Pi> robot:
Board components (56 notes):
| item / part | NR. | description | price |
| 24EP128MC202 | 18 | Microchip |
86.40
|
| IC socket | 18 | 28 pins |
40.00
|
| IC socket | 18 | 14 pins |
27.00
|
| 6N137 | 1 | optocoupler |
2.00
|
| PCB | 3 | 100 x 235 + processing (drills, solder, etching baths, films) |
600.00
|
| Sounders | 54 | ABT408RC |
54.00
|
| IC socket | 1 | 8 pins |
1.00
|
| SMPS 5V - 2A | 3 | XP Power ECB10US05 |
90.00
|
| 5-pole DIN sockets | 1 | Preh, vertical mount, bajonet |
12.00
|
| 74AC08B | 18 | 3V/5V AND-gates |
41.40
|
| LM2940 - TO220 | 3 | 3V3 voltage regulator |
7.50
|
| ICD headers 6-pins | 18 | Molex |
9.00
|
| FQPF20N06L | 60 | power MOSFET |
213.60
|
| 2 pole Weidmueller | 54 | socket and plug |
324.00
|
| 3 pole Weidmueller | 3 | socket and plug |
18.00
|
| Fuse | 3 | self resetting fuse |
3.00
|
| Tantalum capacitors | 30 |
60.00
|
|
| 100nF bypass caps | 60 | 5% ceramic |
18.00
|
| Resistors | 120 | 1% metalfilm |
60.00
|
| LED's | 18 | red |
9.00
|
| Omron Relay | 1 |
16.00
|
|
| OUD Relay | 2 |
22.00
|
|
| Bourns trimpots | 56 | Bourns multiturn |
280.00
|
| Figure 8 connector | 1 | PCB mount |
5.00
|
| Blue 1W LED | 2 | TO220 - PWR350 T21B1 |
6.00
|
| Green LED | 6 |
3.00
|
|
| Inductors | 18 | 47uH |
75.00
|
| Total: |
2082.90
|
Mechanical parts and general assembly::
| item / part | NR. | description | price |
| polycarbonate plate material | 1 | 480 x 320 x 8 |
24.00
|
| brass tubing |
15.00
|
||
| M3 bolts and nuts | 24 | stainless steel |
12.00
|
| Epoxy glue | 1 | fast setting |
10.00
|
| 10 mm distance holders | 6 | 3 mm |
3.00
|
| Loctite Cyanoacrylate glue | 4 | gel |
38.00
|
| Power cord | 1 | figure-8 plug |
2.00
|
| MIDI cable | 1 |
12.00
|
|
| Pipe metal - Sn/Sb, brass, Sn/Pb | 3 kg |
150.00
|
|
| Stainless steel | 1 kg |
35.00
|
|
| M4 bolts and nuts | 20 | stainless steel |
15.00
|
| Alu handles with M4 thread | 53 |
159.00
|
|
| Wood |
2.00
|
||
| Handles | 2 | stainless steel, M4 |
12.00
|
| Total: |
489.00
|
total cost for materials: 2082.90 Euro + 489.00 Euro = 2571.90 Euro
Labor and research investment:
21.03.2022 --> 13.05.2022: 8 weeks or 40 working days a 315 / d = 12600 Euro
End cost of experimental prototype <4Pi> production: 15172 Euro.
With the cost of the flightcase: 16.000 Euro.
by Godfried-Willem Raes
Further reading on this topic (some in Dutch):
Audsley, George Ashdown 'The Art of Organ-Building', ed. Dover Inc, NY,1965,
(first edition: 1905) ISBN 0-486-21314-5
D'Appolito, J. 'Luidspreker-meettechniek', ed. Segment BV, Beek , Nederland,
2000, ISBN: 90 5381 116 8
De Keyser, Ignace, 'Challenging
von Hornbostel & Sachs', in: 50 years at Logos, 2019
Raes, Godfried-Willem 'Bug', an automated fluegelhorn (2017)
Raes, Godfried-Willem , Expression
control in musical automatons
Raes, Godfried-Willem, "Logos @ 50, het kloppend hart van de avant-gardemuziek
in Vlaanderen" (book, 2018)
Maintenance and disassembly instructions:
The pipes are fixed in the pipeholder using bees wax. Heat gently to remove pipes. Replace them with molten wax. The melting temperature for bees wax is ca.150 degrees. A hot air jet may come in handy here.
To correct voicing and intonation, the multiturn trimpotmeters on the PCB's can be used. Note that turning the screw counterclockwise increases sound volume, turning right, clockwise, reduces volume. The trimpots gave 25 turns and the end positions sound a very soft 'click'. Modifications on the tuning can only be done by editing the lookup tables in the PIC-firmware.
For transportation the specific flightcase for <4Pi> should be used.
[EOF]
{kind=link}
{kind=link}